
In this tutorial, you will learn how to automatically detect natural disasters (earthquakes, floods, wildfires, cyclones/hurricanes) with up to 95% accuracy using Keras, Computer Vision, and Deep Learning.
I remember the first time I ever experienced a natural disaster — I was just a kid in kindergarten, no more than 6-7 years old.
We were outside for recess, playing on the jungle gym, running around like the wild animals that young children are.
Rain was in the forecast. It was cloudy. And very humid.
My mother had given me a coat to wear outside, but I was hot and uncomfortable — the humidity made the cotton/polyester blend stick to my skin. The coat, just like the air around me, was suffocating.
All of a sudden the sky changed from “normal rain clouds” to an ominous green.
The recess monitor reached into her pocket, grabbed her whistle, and blew it, indicating it was time for us to settle our wild animal antics and come inside for schooling.
After recess we would typically sit in a circle around the teacher’s desk for show-and-tell.
But not this time.
We were immediately rushed into the hallway and were told to cover our heads with our hands — a tornado had just touched down near our school.
Just the thought of a tornado is enough to scare a kid.
But to actually experience one?
That’s something else entirely.
The wind picked up dramatically, an angry tempest howling and berating our school with tree branches, rocks, and whatever loose debris was not tied down.
The entire ordeal couldn’t have lasted more than 5-10 minutes — but it felt like a terrifying eternity.
It turned out that we were safe the entire time. After the tornado had touched down it started carving a path through the cornfields away from our school, not toward it.
We were lucky.
It’s interesting how experiences as a young kid, especially the ones that scare you, shape you and mold you after you grow up.
A few days after the event my mom took me to the local library. I picked out every book on tornados and hurricanes that I could find. Even though I only had a basic reading level at the time, I devoured them, studying the pictures intently until I could recreate them in my mind — imagining what it would be like to be inside one of those storms.
Later, in graduate school, I experienced the historic June 29th, 2012 derecho that delivered 60+ MPH sustained winds and gusts of over 100 MPH, knocking down power lines and toppling large trees.
That storm killed 29 people, injured hundreds of others, and caused loss of electricity and power in parts of the United States east coast for over 6 days, an unprecedented amount of time in the modern-day United States.
Natural disasters cannot be prevented — but they can be detected, giving people precious time to get to safety.
In this tutorial, you’ll learn how we can use Computer Vision and Deep Learning to help detect natural disasters.
To learn how to detect natural disasters with Keras, Computer Vision, and Deep Learning, just keep reading!
Detecting Natural Disasters with Keras and Deep Learning
In the first part of this tutorial, we’ll discuss how computer vision and deep learning algorithms can be used to automatically detect natural disasters in images and video streams.
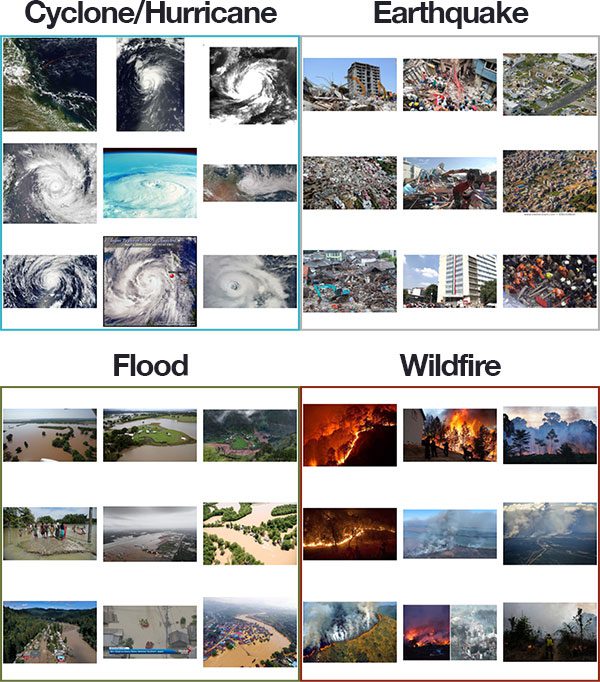
From there we’ll review our natural disaster dataset which consists of four classes:
- Cyclone/hurricane
- Earthquake
- Flood
- Wildfire
We’ll then design a set of experiments that will:
- Help us fine-tune VGG16 (pre-trained on ImageNet) on our dataset.
- Find optimal learning rates.
- Train our model and obtain > 95% accuracy!
Let’s get started!
How can computer vision and deep learning detect natural disasters?

Natural disasters cannot be prevented — but they can be detected.
All around the world we use sensors to monitor for natural disasters:
- Seismic sensors (seismometers) and vibration sensors (seismoscopes) are used to monitor for earthquakes (and downstream tsunamis).
- Radar maps are used to detect the signature “hook echo” of a tornado (i.e., a hook that extends from the radar echo).
- Flood sensors are used to measure moisture levels while water level sensors monitor the height of water along a river, stream, etc.
- Wildfire sensors are still in their infancy but hopefully will be able to detect trace amounts of smoke and fire.
Each of these sensors is highly specialized to the task at hand — detect a natural disaster early, alert people, and allow them to get to safety.
Using computer vision we can augment existing sensors, thereby increasing the accuracy of natural disaster detectors, and most importantly, allow people to take precautions, stay safe, and prevent/reduce the number of deaths and injuries that happen due to these disasters.
Our natural disasters image dataset
The dataset we are using here today was curated by PyImageSearch reader, Gautam Kumar.
Gautam used Google Images to gather a total of 4,428 images belonging to four separate classes:
- Cyclone/Hurricane: 928 images
- Earthquake: 1,350
- Flood: 1,073
- Wildfire: 1,077
He then trained a Convolutional Neural Network to recognize each of the natural disaster cases.
Gautam shared his work on his LinkedIn profile, gathering the attention of many deep learning practitioners (myself included). I asked him if he would be willing to (1) share his dataset with the PyImageSearch community and (2) allow me to write a tutorial using the dataset. Gautam agreed, and here we are today!
I again want to give a big, heartfelt thank you to Gautam for his hard work and contribution — be sure to thank him if you have the chance!
Downloading the natural disasters dataset
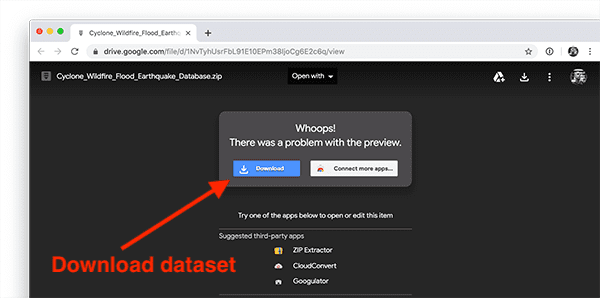
You can use this link to download the original natural disasters dataset via Google Drive.
After you download the archive you should unzip it and inspect the contents:
$ tree --dirsfirst --filelimit 10 Cyclone_Wildfire_Flood_Earthquake_Database Cyclone_Wildfire_Flood_Earthquake_Database ├── Cyclone [928 entries] ├── Earthquake [1350 entries] ├── Flood [1073 entries] ├── Wildfire [1077 entries] └── readme.txt 4 directories, 1 file
Here you can see that each of the natural disasters has its own directory with examples of each class residing inside its respective parent directory.
Project structure
Using the tree command, let’s review today’s project available via the “Downloads” section of this tutorial:
$ tree --dirsfirst --filelimit 10 . ├── Cyclone_Wildfire_Flood_Earthquake_Database │ ├── Cyclone [928 entries] │ ├── Earthquake [1350 entries] │ ├── Flood [1073 entries] │ ├── Wildfire [1077 entries] │ └── readme.txt ├── output │ ├── natural_disaster.model │ │ ├── assets │ │ ├── variables │ │ │ ├── variables.data-00000-of-00002 │ │ │ ├── variables.data-00001-of-00002 │ │ │ └── variables.index │ │ └── saved_model.pb │ ├── clr_plot.png │ ├── lrfind_plot.png │ └── training_plot.png ├── pyimagesearch │ ├── __init__.py │ ├── clr_callback.py │ ├── config.py │ └── learningratefinder.py ├── videos │ ├── floods_101_nat_geo.mp4 │ ├── fort_mcmurray_wildfire.mp4 │ ├── hurricane_lorenzo.mp4 │ ├── san_andreas.mp4 │ └── terrific_natural_disasters_compilation.mp4 ├── Cyclone_Wildfire_Flood_Earthquake_Database.zip ├── train.py └── predict.py 11 directories, 20 files
Our project contains:
- The natural disaster dataset. Refer to the previous two sections.
- An
output/directory where our model and plots will be stored. The results from my experiment are included. - Our
pyimagesearchmodule containing our Cyclical Learning Rate Keras callback, a configuration file, and Keras Learning Rate Finder. - A selection of
videos/for testing the video classification prediction script. - Our training script,
train.py. This script will perform fine-tuning on a VGG16 model pre-trained on the ImageNet dataset. - Our video classification prediction script,
predict.py, which performs a rolling average prediction to classify the video in real-time.
Our configuration file
Our project is going to span multiple Python files, so to keep our code tidy and organized (and ensure that we don’t have a multitude of command line arguments), let’s instead create a configuration file to store all important paths and variables.
Open up the config.py file inside the pyimagesearch module and insert the following code:
# import the necessary packages import os # initialize the path to the input directory containing our dataset # of images DATASET_PATH = "Cyclone_Wildfire_Flood_Earthquake_Database" # initialize the class labels in the dataset CLASSES = ["Cyclone", "Earthquake", "Flood", "Wildfire"]
The os module import allows us to build OS-agnostic paths directly in this config file (Line 2).
Line 6 specifies the root path to our natural disaster dataset.
Line 7 provides the names of class labels (i.e. the names of the subdirectories in the dataset).
Let’s define our dataset splits:
# define the size of the training, validation (which comes from the # train split), and testing splits, respectively TRAIN_SPLIT = 0.75 VAL_SPLIT = 0.1 TEST_SPLIT = 0.25
Lines 13-15 house our training, testing, and validation split sizes. Take note that the validation split is 10% of the training split (not 10% of all the data).
Next, we’ll define our training parameters:
# define the minimum learning rate, maximum learning rate, batch size, # step size, CLR method, and number of epochs MIN_LR = 1e-6 MAX_LR = 1e-4 BATCH_SIZE = 32 STEP_SIZE = 8 CLR_METHOD = "triangular" NUM_EPOCHS = 48
Lines 19 and 20 contain the minimum and maximum learning rate for Cyclical Learning Rates (CLR).We’ll learn how to set these learning rate values in the “Finding our initial learning rate” section below.
Lines 21-24 define the batch size, step size, CLR method, and the number of training epochs.
From there we’ll define the output paths:
# set the path to the serialized model after training MODEL_PATH = os.path.sep.join(["output", "natural_disaster.model"]) # define the path to the output learning rate finder plot, training # history plot and cyclical learning rate plot LRFIND_PLOT_PATH = os.path.sep.join(["output", "lrfind_plot.png"]) TRAINING_PLOT_PATH = os.path.sep.join(["output", "training_plot.png"]) CLR_PLOT_PATH = os.path.sep.join(["output", "clr_plot.png"])
Lines 27-33 define the following output paths:
- Serialized model after training
- Learning rate finder plot
- Training history plot
- CLR plot
Implementing our training script with Keras
Our training procedure will consist of two steps:
- Step #1: Use our learning rate finder to find optimal learning rates to fine-tune our VGG16 CNN on our dataset.
- Step #2: Use our optimal learning rates in conjunction with Cyclical Learning Rates (CLR) to obtain a high accuracy model.
Our train.py file will handle both of these steps.
Go ahead and open up train.py in your favorite code editor and insert the following code:
# set the matplotlib backend so figures can be saved in the background
import matplotlib
matplotlib.use("Agg")
# import the necessary packages
from tensorflow.keras.preprocessing.image import ImageDataGenerator
from tensorflow.keras.applications import VGG16
from tensorflow.keras.layers import Dropout
from tensorflow.keras.layers import Flatten
from tensorflow.keras.layers import Dense
from tensorflow.keras.layers import Input
from tensorflow.keras.models import Model
from tensorflow.keras.optimizers import SGD
from sklearn.preprocessing import LabelBinarizer
from sklearn.model_selection import train_test_split
from sklearn.metrics import classification_report
from pyimagesearch.learningratefinder import LearningRateFinder
from pyimagesearch.clr_callback import CyclicLR
from pyimagesearch import config
from imutils import paths
import matplotlib.pyplot as plt
import numpy as np
import argparse
import pickle
import cv2
import sys
import os
Lines 2-27 import necessary packages including:
matplotlib: For plotting (using the"Agg"backend so plot images can be saved to disk).tensorflow: Imports including ourVGG16CNN, data augmentation, layer types, andSGDoptimizer.scikit-learn: Imports including a label binarizer, dataset splitting function, and an evaluation reporting tool.LearningRateFinder: Our Keras Learning Rate Finder class.CyclicLR: A Keras callback that oscillates learning rates, known as Cyclical Learning Rates. CLRs lead to faster convergence and typically require fewer experiments for hyperparameter updates.config: The custom configuration settings we reviewed in the previous section.paths: Includes a function for listing the image paths in a directory tree.cv2: OpenCV for preprocessing and display.
Let’s parse command line arguments and grab our image paths:
# construct the argument parser and parse the arguments
ap = argparse.ArgumentParser()
ap.add_argument("-f", "--lr-find", type=int, default=0,
help="whether or not to find optimal learning rate")
args = vars(ap.parse_args())
# grab the paths to all images in our dataset directory and initialize
# our lists of images and class labels
print("[INFO] loading images...")
imagePaths = list(paths.list_images(config.DATASET_PATH))
data = []
labels = []
Recall that most of our settings are in config.py . There is one exception. The --lr-find command line argument tells our script whether or not to find the optimal learning rate (Lines 30-33).
Line 38 grabs paths to all images in our dataset.
We then initialize two synchronized lists to hold our image data and labels (Lines 39 and 40).
Let’s populate the data and labels lists now:
# loop over the image paths
for imagePath in imagePaths:
# extract the class label
label = imagePath.split(os.path.sep)[-2]
# load the image, convert it to RGB channel ordering, and resize
# it to be a fixed 224x224 pixels, ignoring aspect ratio
image = cv2.imread(imagePath)
image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
image = cv2.resize(image, (224, 224))
# update the data and labels lists, respectively
data.append(image)
labels.append(label)
# convert the data and labels to NumPy arrays
print("[INFO] processing data...")
data = np.array(data, dtype="float32")
labels = np.array(labels)
# perform one-hot encoding on the labels
lb = LabelBinarizer()
labels = lb.fit_transform(labels)
Lines 43-55 loop over imagePaths, while:
- Extracting the class
labelfrom the path (Line 45). - Loading and preprocessing the
image(Lines 49-51). Images are converted to RGB channel ordering and resized to 224×224 for VGG16. - Adding the preprocessed
imageto thedatalist (Line 54). - Adding the
labelto thelabelslist (Lines 55).
Line 59 performs a final preprocessing step by converting the data to a "float32" datatype NumPy array.
Similarly, Line 60 converts labels to an array so that Lines 63 and 64 can perform one-hot encoding.
From here, we’ll partition our data and set up data augmentation:
# partition the data into training and testing splits (trainX, testX, trainY, testY) = train_test_split(data, labels, test_size=config.TEST_SPLIT, random_state=42) # take the validation split from the training split (trainX, valX, trainY, valY) = train_test_split(trainX, trainY, test_size=config.VAL_SPLIT, random_state=84) # initialize the training data augmentation object aug = ImageDataGenerator( rotation_range=30, zoom_range=0.15, width_shift_range=0.2, height_shift_range=0.2, shear_range=0.15, horizontal_flip=True, fill_mode="nearest")
Lines 67-72 construct training, testing, and validation splits.
Lines 75-82 instantiate our data augmentation object. Read more about data augmentation in my previous posts as well as in the Practitioner Bundle of Deep Learning for Computer Vision with Python.
At this point we’ll set up our VGG16 model for fine-tuning:
# load the VGG16 network, ensuring the head FC layer sets are left
# off
baseModel = VGG16(weights="imagenet", include_top=False,
input_tensor=Input(shape=(224, 224, 3)))
# construct the head of the model that will be placed on top of the
# the base model
headModel = baseModel.output
headModel = Flatten(name="flatten")(headModel)
headModel = Dense(512, activation="relu")(headModel)
headModel = Dropout(0.5)(headModel)
headModel = Dense(len(config.CLASSES), activation="softmax")(headModel)
# place the head FC model on top of the base model (this will become
# the actual model we will train)
model = Model(inputs=baseModel.input, outputs=headModel)
# loop over all layers in the base model and freeze them so they will
# *not* be updated during the first training process
for layer in baseModel.layers:
layer.trainable = False
# compile our model (this needs to be done after our setting our
# layers to being non-trainable
print("[INFO] compiling model...")
opt = SGD(lr=config.MIN_LR, momentum=0.9)
model.compile(loss="categorical_crossentropy", optimizer=opt,
metrics=["accuracy"])
Lines 86 and 87 load VGG16 using pre-trained ImageNet weights (but without the fully-connected layer head).
Lines 91-95 create a new fully-connected layer head followed by Line 99 which adds the new FC layer to the body of VGG16.
Lines 103 and 104 mark the body of VGG16 as not trainable — we will be training (i.e. fine-tuning) only the FC layer head.
Lines 109-111 then compile our model with the Stochastic Gradient Descent (SGD ) optimizer and our specified minimum learning rate.
The first time you run the script, you should set the --lr-find command line argument to use the Keras Learning Rate Finder to determine the optimal learning rate. Let’s see how that works:
# check to see if we are attempting to find an optimal learning rate
# before training for the full number of epochs
if args["lr_find"] > 0:
# initialize the learning rate finder and then train with learning
# rates ranging from 1e-10 to 1e+1
print("[INFO] finding learning rate...")
lrf = LearningRateFinder(model)
lrf.find(
aug.flow(trainX, trainY, batch_size=config.BATCH_SIZE),
1e-10, 1e+1,
stepsPerEpoch=np.ceil((trainX.shape[0] / float(config.BATCH_SIZE))),
epochs=20,
batchSize=config.BATCH_SIZE)
# plot the loss for the various learning rates and save the
# resulting plot to disk
lrf.plot_loss()
plt.savefig(config.LRFIND_PLOT_PATH)
# gracefully exit the script so we can adjust our learning rates
# in the config and then train the network for our full set of
# epochs
print("[INFO] learning rate finder complete")
print("[INFO] examine plot and adjust learning rates before training")
sys.exit(0)
Line 115 checks to see if we should attempt to find optimal learning rates. Assuming so, we:
- Initialize
LearningRateFinder(Line 119). - Start training with a
1e-10learning rate and exponentially increase it until we hit1e+1(Lines 120-125). - Plot the loss vs. learning rate and save the resulting figure (Lines 129 and 130).
- Gracefully
exitthe script after printing a message instructing the user to inspect the learning rate finder plot (Lines 135-137).
After this code executes we now need to:
- Step #1: Review the generated plot.
- Step #2: Update
config.pywith ourMIN_LRandMAX_LR, respectively. - Step #3: Train the network on our full dataset.
Assuming we have completed Steps #1 and #2, let’s now handle Step #3 where our minimum and maximum learning rate have already been found and updated in the config.
In this case, it is time to initialize our Cyclical Learning Rate class and commence training:
# otherwise, we have already defined a learning rate space to train
# over, so compute the step size and initialize the cyclic learning
# rate method
stepSize = config.STEP_SIZE * (trainX.shape[0] // config.BATCH_SIZE)
clr = CyclicLR(
mode=config.CLR_METHOD,
base_lr=config.MIN_LR,
max_lr=config.MAX_LR,
step_size=stepSize)
# train the network
print("[INFO] training network...")
H = model.fit_generator(
aug.flow(trainX, trainY, batch_size=config.BATCH_SIZE),
validation_data=(valX, valY),
steps_per_epoch=trainX.shape[0] // config.BATCH_SIZE,
epochs=config.NUM_EPOCHS,
callbacks=[clr],
verbose=1)
Lines 142-147 initialize our CyclicLR .
Lines 151-157 then train our model using .fit_generator with our aug data augmentation object and our clr callback.
Upon training completion, we proceed to evaluate and save our model :
# evaluate the network and show a classification report
print("[INFO] evaluating network...")
predictions = model.predict(testX, batch_size=config.BATCH_SIZE)
print(classification_report(testY.argmax(axis=1),
predictions.argmax(axis=1), target_names=config.CLASSES))
# serialize the model to disk
print("[INFO] serializing network to '{}'...".format(config.MODEL_PATH))
model.save(config.MODEL_PATH)
Line 161 makes predictions on our test set. Those predictions are passed into Lines 162 and 163 which print a classification report summary.
Line 167 serializes and saves the fine-tuned model to disk.
Finally, let’s plot both our training history and CLR history:
# construct a plot that plots and saves the training history
N = np.arange(0, config.NUM_EPOCHS)
plt.style.use("ggplot")
plt.figure()
plt.plot(N, H.history["loss"], label="train_loss")
plt.plot(N, H.history["val_loss"], label="val_loss")
plt.plot(N, H.history["accuracy"], label="train_acc")
plt.plot(N, H.history["val_accuracy"], label="val_acc")
plt.title("Training Loss and Accuracy")
plt.xlabel("Epoch #")
plt.ylabel("Loss/Accuracy")
plt.legend(loc="lower left")
plt.savefig(config.TRAINING_PLOT_PATH)
# plot the learning rate history
N = np.arange(0, len(clr.history["lr"]))
plt.figure()
plt.plot(N, clr.history["lr"])
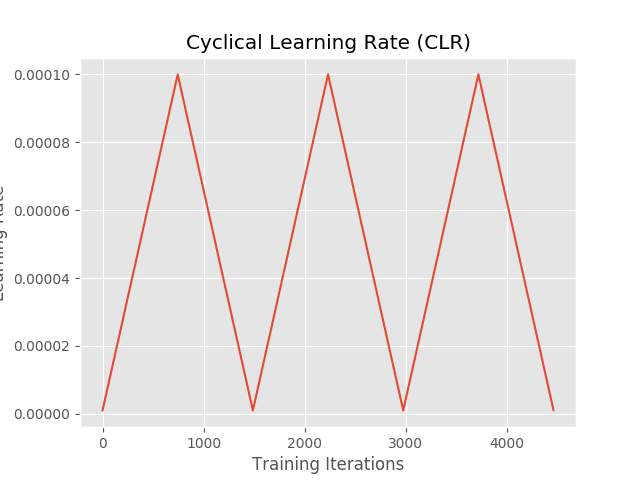
plt.title("Cyclical Learning Rate (CLR)")
plt.xlabel("Training Iterations")
plt.ylabel("Learning Rate")
plt.savefig(config.CLR_PLOT_PATH)
Lines 170-181 generate a plot of our training history and save the plot to disk.
Note: In TensorFlow 2.0, the history dictionary keys have changed from acc to accuracy and val_acc to val_accuracy . It is especially confusing since “accuracy” is spelled out now, but “validation” is not. Take special care with this nuance depending on your TensorFlow version.
Lines 184-190 plot our Cyclical Learning Rate history and save the figure to disk.
Finding our initial learning rate
Before we attempt to fine-tune our model to recognize natural disasters, let’s first use our learning rate finder to find an optimal set of learning rate ranges. Using this optimal learning rate range we’ll then be able to apply Cyclical Learning Rates to improve our model accuracy.
Make sure you have both:
- Used the “Downloads” section of this tutorial to download the source code.
- Downloaded the dataset using the “Downloading the natural disasters dataset” section above.
From there, open up a terminal and execute the following command:
$ python train.py --lr-find 1 [INFO] loading images... [INFO] processing data... [INFO] compiling model... [INFO] finding learning rate... Epoch 1/20 94/94 [==============================] - 29s 314ms/step - loss: 9.7411 - accuracy: 0.2664 Epoch 2/20 94/94 [==============================] - 28s 295ms/step - loss: 9.5912 - accuracy: 0.2701 Epoch 3/20 94/94 [==============================] - 27s 291ms/step - loss: 9.4601 - accuracy: 0.2731 ... Epoch 12/20 94/94 [==============================] - 27s 290ms/step - loss: 2.7111 - accuracy: 0.7764 Epoch 13/20 94/94 [==============================] - 27s 286ms/step - loss: 5.9785 - accuracy: 0.6084 Epoch 14/20 47/94 [==============>...............] - ETA: 13s - loss: 10.8441 - accuracy: 0.3261 [INFO] learning rate finder complete [INFO] examine plot and adjust learning rates before training
Provided the train.py script exited without error, you should now have a file named lrfind_plot.png in your output directory.
Take a second now to inspect this image:
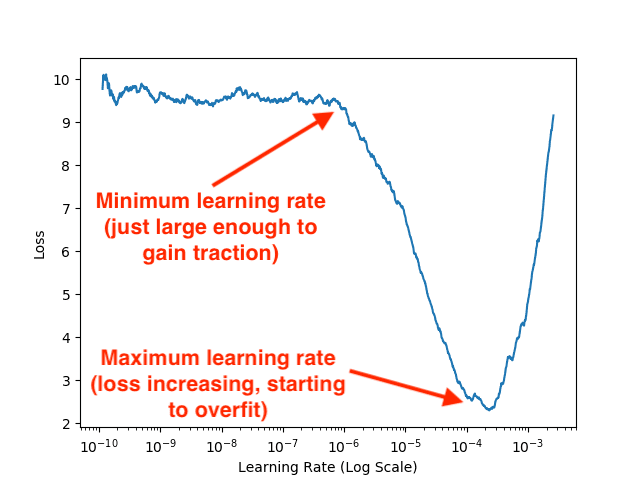
Examining the plot you can see that our model initially starts to learn and gain traction around 1e-6 .
Our loss continues to drop until approximately 1e-4 where it starts to rise again, a sure sign of overfitting.
Our optimal learning rate range is, therefore, 1e-6 to 1e-4 .
Update our learning rates
Now that we know our optimal learning rates, let’s go back to our config.py file and update them accordingly:
# define the minimum learning rate, maximum learning rate, batch size, # step size, CLR method, and number of epochs MIN_LR = 1e-6 MAX_LR = 1e-4 BATCH_SIZE = 32 STEP_SIZE = 8 CLR_METHOD = "triangular" NUM_EPOCHS = 48
Notice on Lines 19 and 20 (highlighted) of our configuration file that the MIN_LR and MAX_LR learning rate values are freshly updated. These values were found by inspecting our Keras Learning Rate Finder plot in the section above.
Training the natural disaster detection model with Keras
We can now fine-tune our model to recognize natural disasters!
Execute the following command which will train our network over the full set of epochs:
$ python train.py
[INFO] loading images...
[INFO] processing data...
[INFO] compiling model...
[INFO] training network...
Epoch 1/48
93/93 [==============================] - 32s 343ms/step - loss: 8.5819 - accuracy: 0.3254 - val_loss: 2.5915 - val_accuracy: 0.6829
Epoch 2/48
93/93 [==============================] - 30s 320ms/step - loss: 4.2144 - accuracy: 0.6194 - val_loss: 1.2390 - val_accuracy: 0.8573
Epoch 3/48
93/93 [==============================] - 29s 316ms/step - loss: 2.5044 - accuracy: 0.7605 - val_loss: 1.0052 - val_accuracy: 0.8862
Epoch 4/48
93/93 [==============================] - 30s 322ms/step - loss: 2.0702 - accuracy: 0.8011 - val_loss: 0.9150 - val_accuracy: 0.9070
Epoch 5/48
93/93 [==============================] - 29s 313ms/step - loss: 1.5996 - accuracy: 0.8366 - val_loss: 0.7397 - val_accuracy: 0.9268
...
Epoch 44/48
93/93 [==============================] - 28s 304ms/step - loss: 0.2180 - accuracy: 0.9275 - val_loss: 0.2608 - val_accuracy: 0.9476
Epoch 45/48
93/93 [==============================] - 29s 315ms/step - loss: 0.2521 - accuracy: 0.9178 - val_loss: 0.2693 - val_accuracy: 0.9449
Epoch 46/48
93/93 [==============================] - 29s 312ms/step - loss: 0.2330 - accuracy: 0.9284 - val_loss: 0.2687 - val_accuracy: 0.9467
Epoch 47/48
93/93 [==============================] - 29s 310ms/step - loss: 0.2120 - accuracy: 0.9322 - val_loss: 0.2646 - val_accuracy: 0.9476
Epoch 48/48
93/93 [==============================] - 29s 311ms/step - loss: 0.2237 - accuracy: 0.9318 - val_loss: 0.2664 - val_accuracy: 0.9485
[INFO] evaluating network...
precision recall f1-score support
Cyclone 0.99 0.97 0.98 205
Earthquake 0.96 0.93 0.95 362
Flood 0.90 0.94 0.92 267
Wildfire 0.96 0.97 0.96 273
accuracy 0.95 1107
macro avg 0.95 0.95 0.95 1107
weighted avg 0.95 0.95 0.95 1107
[INFO] serializing network to 'output/natural_disaster.model'...
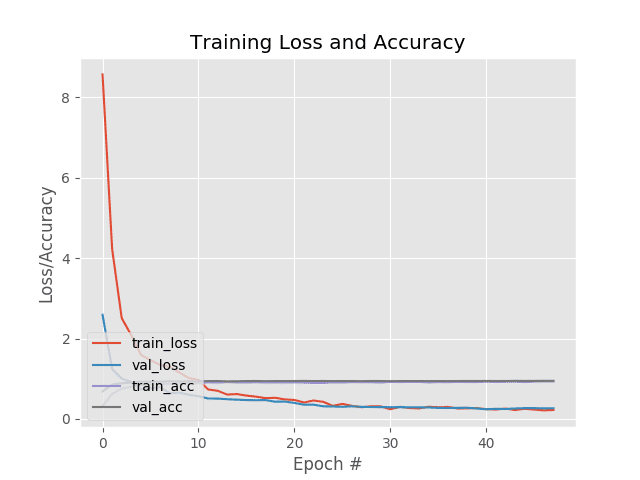
Here you can see that we are obtaining 95% accuracy when recognizing natural disasters in the testing set!
Examining our training plot we can see that our validation loss follows our training loss, implying there is little overfitting within our dataset itself:
Finally, we have our learning rate plot which shows our our CLR callback oscillates the learning rate between our MIN_LR and MAX_LR, respectively:
Implementing our natural disaster prediction script
Now that our model has been trained, let’s see how we can use it to make predictions on images/video it has never seen before — and thereby pave the way for an automatic natural disaster detection system.
To create this script we’ll take advantage of the temporal nature of videos, specifically the assumption that subsequent frames in a video will have similar semantic contents.
By performing rolling prediction accuracy we’ll be able to “smooth out” the predictions and avoid “prediction flickering”.
I have already covered this near-identical script in-depth in my Video Classification with Keras and Deep Learning article. Be sure to refer to that article for the full background and more-detailed code explanations.
To accomplish natural disaster video classification let’s inspect predict.py:
# import the necessary packages
from tensorflow.keras.models import load_model
from pyimagesearch import config
from collections import deque
import numpy as np
import argparse
import cv2
# construct the argument parser and parse the arguments
ap = argparse.ArgumentParser()
ap.add_argument("-i", "--input", required=True,
help="path to our input video")
ap.add_argument("-o", "--output", required=True,
help="path to our output video")
ap.add_argument("-s", "--size", type=int, default=128,
help="size of queue for averaging")
ap.add_argument("-d", "--display", type=int, default=-1,
help="whether or not output frame should be displayed to screen")
args = vars(ap.parse_args())
Lines 2-7 load necessary packages and modules. In particular, we’ll be using deque from Python’s collections module to assist with our rolling average algorithm.
Lines 10-19 parse command line arguments including the path to our input/output videos, size of our rolling average queue, and whether we will display the output frame to our screen while the video is being generated.
Let’s go ahead and load our natural disaster classification model and initialize our queue + video stream:
# load the trained model from disk
print("[INFO] loading model and label binarizer...")
model = load_model(config.MODEL_PATH)
# initialize the predictions queue
Q = deque(maxlen=args["size"])
# initialize the video stream, pointer to output video file, and
# frame dimensions
print("[INFO] processing video...")
vs = cv2.VideoCapture(args["input"])
writer = None
(W, H) = (None, None)
With our model , Q , and vs ready to go, we’ll begin looping over frames:
# loop over frames from the video file stream
while True:
# read the next frame from the file
(grabbed, frame) = vs.read()
# if the frame was not grabbed, then we have reached the end
# of the stream
if not grabbed:
break
# if the frame dimensions are empty, grab them
if W is None or H is None:
(H, W) = frame.shape[:2]
# clone the output frame, then convert it from BGR to RGB
# ordering and resize the frame to a fixed 224x224
output = frame.copy()
frame = cv2.cvtColor(frame, cv2.COLOR_BGR2RGB)
frame = cv2.resize(frame, (224, 224))
frame = frame.astype("float32")
Lines 38-47 grab a frame and store its dimensions.
Lines 51-54 duplicate our frame for output purposes and then preprocess it for classification. The preprocessing steps are, and must be, the same as those that we performed for training.
Now let’s make a natural disaster prediction on the frame:
# make predictions on the frame and then update the predictions # queue preds = model.predict(np.expand_dims(frame, axis=0))[0] Q.append(preds) # perform prediction averaging over the current history of # previous predictions results = np.array(Q).mean(axis=0) i = np.argmax(results) label = config.CLASSES[i]
Lines 58 and 59 perform inference and add the predictions to our queue.
Line 63 performs a rolling average prediction of the predictions available in the Q .
Lines 64 and 65 then extract the highest probability class label so that we can annotate our frame:
# draw the activity on the output frame
text = "activity: {}".format(label)
cv2.putText(output, text, (35, 50), cv2.FONT_HERSHEY_SIMPLEX,
1.25, (0, 255, 0), 5)
# check if the video writer is None
if writer is None:
# initialize our video writer
fourcc = cv2.VideoWriter_fourcc(*"MJPG")
writer = cv2.VideoWriter(args["output"], fourcc, 30,
(W, H), True)
# write the output frame to disk
writer.write(output)
# check to see if we should display the output frame to our
# screen
if args["display"] > 0:
# show the output image
cv2.imshow("Output", output)
key = cv2.waitKey(1) & 0xFF
# if the `q` key was pressed, break from the loop
if key == ord("q"):
break
# release the file pointers
print("[INFO] cleaning up...")
writer.release()
vs.release()
Lines 68-70 annotate the natural disaster activity in the corner of the output frame.
Lines 73-80 handle writing the output frame to a video file.
If the --display flag is set, Lines 84-91 display the frame to the screen and capture keypresses.
Otherwise, processing continues until completion at which point the loop is finished and we perform cleanup (Lines 95 and 96).
Predicting natural disasters with Keras
For the purposes of this tutorial, I downloaded example natural disaster videos via YouTube — the exact videos are listed in the “Credits” section below. You can either use your own example videos or download the videos via the credits list.
Either way, make sure you have used the “Downloads” section of this tutorial to download the source code and pre-trained natural disaster prediction model.
Once downloaded you can use the following command to launch the predict.py script:
$ python predict.py --input videos/terrific_natural_disasters_compilation.mp4 \ --output output/natural_disasters_output.avi [INFO] processing video... [INFO] cleaning up...
Here you can see a sample result of our model correctly classifying this video clip as “flood”:

The following example comes from the 2016 Fort McMurray wildfire:

For fun, I then tried applying the natural disaster detector to the movie San Andreas (2015):

Notice how our model was able to correctly label the video clip as an (overly dramatized) earthquake.
You can find a full demo video below:
I strongly believe that if you had the right teacher you could master computer vision and deep learning. Do you think learning computer vision and deep learning has to be time-consuming, overwhelming, and complicated? Or has to involve complex mathematics and equations? Or requires a degree in computer science? That’s not the case. All you need to master computer vision and deep learning is for someone to explain things to you in simple, intuitive terms. And that’s exactly what I do. My mission is to change education and how complex Artificial Intelligence topics are taught. If you're serious about learning computer vision, your next stop should be PyImageSearch University, the most comprehensive computer vision, deep learning, and OpenCV course online today. Here you’ll learn how to successfully and confidently apply computer vision to your work, research, and projects. Join me in computer vision mastery. Inside PyImageSearch University you'll find:What's next? We recommend PyImageSearch University.
86+ total classes • 115+ hours hours of on-demand code walkthrough videos • Last updated: June 2026
★★★★★ 4.84 (128 Ratings) • 16,000+ Students Enrolled
Credits
Dataset curator:
Video sources for the demo:
- Hurricane Lorenzo Wreaks Havoc on The Azores on its way to UK
- Fort McMurray wildfire: A timeline of a disaster
- Floods 101 | National Geographic
- 9.6 Magnitude Earthquake (Scenes from the film San Andreas 2015)
- Terrific National Disasters Compilation
Audio for the demo video:
Summary
In this tutorial, you learned how to use computer vision and the Keras deep learning library to automatically detect natural disasters from images.
To create our natural disaster detector we fine-tuned VGG16 (pre-trained on ImageNet) on a dataset of 4,428 images belonging to four classes:
- Cyclone/hurricane
- Earthquake
- Flood
- Wildfire
After our model was trained we evaluated it on the testing set, finding that it obtained 95% classification accuracy.
Using this model you can continue to perform research in natural disaster detection, ultimately helping save lives and reduce injury.
I hope you enjoyed this post!
To download the source code to the post (and be notified when future tutorials are published on PyImageSearch), just enter your email address in the form below.

Download the Source Code and FREE 17-page Resource Guide
Enter your email address below to get a .zip of the code and a FREE 17-page Resource Guide on Computer Vision, OpenCV, and Deep Learning. Inside you'll find my hand-picked tutorials, books, courses, and libraries to help you master CV and DL!

