Last updated on July 7, 2021.

This tutorial is the second post in our three-part series on shape detection and analysis.
Last week we learned how to compute the center of a contour using OpenCV.
Today, we are going to leverage contour properties to actually label and identify shapes in an image, just like in the figure at the top of this post.
- Update July 2021: Added new sections, including how to utilize feature extraction, machine learning, and deep learning for shape recognition.
OpenCV shape detection
Before we get started with this tutorial, let’s quickly review our project structure:
|--- pyimagesearch | |--- __init__.py | |--- shapedetector.py |--- detect_shapes.py |--- shapes_and_colors.png
As you can see, we have defined a pyimagesearch module. Inside this module we have shapedetector.py which will store our implementation of the ShapeDetector class.
Finally, we have the detect_shapes.py driver script that we’ll use to load an image from disk, analyze it for shapes, and then perform shape detection and identification via the ShapeDetector class.
Before we get started, make sure you have the imutils package installed on your system, a series of OpenCV convenience functions that we’ll be using later in this tutorial:
$ pip install imutils
Defining our shape detector
The first step in building our shape detector is to write some code to encapsulate the shape identification logic.
Let’s go ahead and define our ShapeDetector. Open up the shapedetector.py file and insert the following code:
# import the necessary packages import cv2 class ShapeDetector: def __init__(self): pass def detect(self, c): # initialize the shape name and approximate the contour shape = "unidentified" peri = cv2.arcLength(c, True) approx = cv2.approxPolyDP(c, 0.04 * peri, True)
Line 4 starts the definition of our ShapeDetector class. We’ll skip the __init__ constructor here since nothing needs to be initialized.
We then have our detect method on Line 8 which requires only a single argument, c, the contour (i.e., outline) of the shape we are trying to identify.
In order to perform shape detection, we’ll be using contour approximation.
As the name suggests, contour approximation is an algorithm for reducing the number of points in a curve with a reduced set of points — thus the term approximation.
This algorithm is commonly known as the Ramer-Douglas-Peucker algorithm, or simply the split-and-merge algorithm.
Contour approximation is predicated on the assumption that a curve can be approximated by a series of short line segments. This leads to a resulting approximated curve that consists of a subset of points that were defined by the original curve.
Contour approximation is actually already implemented in OpenCV via the cv2.approxPolyDP method.
In order to perform contour approximation, we first compute the perimeter of the contour (Line 11), followed by constructing the actual contour approximation (Line 12).
Common values for the second parameter to cv2.approxPolyDP are normally in the range of 1-5% of the original contour perimeter.
Note: Interested in a more in-depth look at contour approximation? Be sure to check out the PyImageSearch Gurus course where I discuss computer vision and image processing fundamentals such as contours and connected-component analysis in detail.
Given our approximated contour, we can move on to performing shape detection:
# if the shape is a triangle, it will have 3 vertices if len(approx) == 3: shape = "triangle" # if the shape has 4 vertices, it is either a square or # a rectangle elif len(approx) == 4: # compute the bounding box of the contour and use the # bounding box to compute the aspect ratio (x, y, w, h) = cv2.boundingRect(approx) ar = w / float(h) # a square will have an aspect ratio that is approximately # equal to one, otherwise, the shape is a rectangle shape = "square" if ar >= 0.95 and ar <= 1.05 else "rectangle" # if the shape is a pentagon, it will have 5 vertices elif len(approx) == 5: shape = "pentagon" # otherwise, we assume the shape is a circle else: shape = "circle" # return the name of the shape return shape
It’s important to understand that a contour consists of a list of vertices. We can check the number of entries in this list to determine the shape of an object.
For example, if the approximated contour has three vertices, then it must be a triangle (Lines 15 and 16).
If a contour has four vertices, then it must be either a square or a rectangle (Line 20). To determine which, we compute the aspect ratio of the shape, which is simply the width of the contour bounding box divided by the height (Lines 23 and 24). If the aspect ratio is ~1.0, then we are examining a square (since all sides have approximately equal length). Otherwise, the shape is a rectangle.
If a contour has five vertices, we can label it as a pentagon (Line 31 and 32).
Otherwise, by process of elimination (in context of this example, of course), we can make the assumption that the shape we are examining is a circle (Lines 35 and 36).
Finally, we return the identified shape to the calling method.
Shape detection with OpenCV
Now that our ShapeDetector class has been defined, let’s create the detect_shapes.py driver script:
# import the necessary packages
from pyimagesearch.shapedetector import ShapeDetector
import argparse
import imutils
import cv2
# construct the argument parse and parse the arguments
ap = argparse.ArgumentParser()
ap.add_argument("-i", "--image", required=True,
help="path to the input image")
args = vars(ap.parse_args())
We start off on Lines 2-5 by importing our required packages. Notice how we’re importing our implementation of the ShapeDetector class from the shapedetector sub-module of pyimagesearch.
Lines 8-11 handle parsing our command line arguments. We only need a single switch here, --image, which is the path to where the image we want to process resides on disk.
Next up, let’s pre-process our image:
# load the image and resize it to a smaller factor so that # the shapes can be approximated better image = cv2.imread(args["image"]) resized = imutils.resize(image, width=300) ratio = image.shape[0] / float(resized.shape[0]) # convert the resized image to grayscale, blur it slightly, # and threshold it gray = cv2.cvtColor(resized, cv2.COLOR_BGR2GRAY) blurred = cv2.GaussianBlur(gray, (5, 5), 0) thresh = cv2.threshold(blurred, 60, 255, cv2.THRESH_BINARY)[1] # find contours in the thresholded image and initialize the # shape detector cnts = cv2.findContours(thresh.copy(), cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE) cnts = imutils.grab_contours(cnts) sd = ShapeDetector()
First, we load our image from disk on Line 15 and resize it on Line 16. We then keep track of the ratio of the old height to the new resized height on Line 17 — we’ll find out exactly why we do this later in the tutorial.
From there, Lines 21-23 handle converting the resized image to grayscale, smoothing it to reduce high frequency noise, and finally thresholding it to reveal the shapes in the image.
After thresholding, our image should look like this:
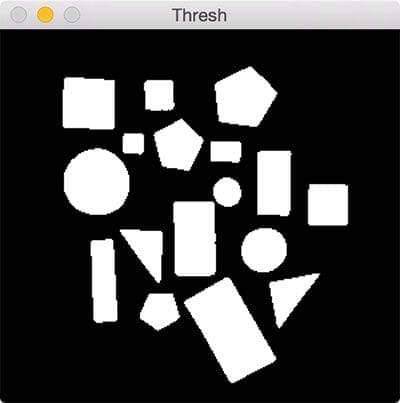
Notice how our image has been binarized — the shapes appear as a white foreground against a black background.
Lastly, we find contours in our binary image, handle grabbing the correct tuple value from cv2.findContours based on our OpenCV version, and finally initialize our ShapeDetector (Lines 27-30).
The last step is to identify each of the contours:
# loop over the contours
for c in cnts:
# compute the center of the contour, then detect the name of the
# shape using only the contour
M = cv2.moments(c)
cX = int((M["m10"] / M["m00"]) * ratio)
cY = int((M["m01"] / M["m00"]) * ratio)
shape = sd.detect(c)
# multiply the contour (x, y)-coordinates by the resize ratio,
# then draw the contours and the name of the shape on the image
c = c.astype("float")
c *= ratio
c = c.astype("int")
cv2.drawContours(image, [c], -1, (0, 255, 0), 2)
cv2.putText(image, shape, (cX, cY), cv2.FONT_HERSHEY_SIMPLEX,
0.5, (255, 255, 255), 2)
# show the output image
cv2.imshow("Image", image)
cv2.waitKey(0)
On Line 33 we start looping over each of the individual contours. For each of them, we compute the center of the contour, followed by performing shape detection and labeling.
Since we are processing the contours extracted from the resized image (rather than the original image), we need to multiply the contours and center (x, y)-coordinates by our resize ratio (Lines 43-45). This will give us the correct (x, y)-coordinates for both the contours and centroid of the original image.
Lastly, we draw the contours and the labeled shape on our image (Lines 44-48), followed by displaying our results (Lines 51 and 52).
To see our shape detector in action, just execute the following command:
$ python detect_shapes.py --image shapes_and_colors.png
As you can see from the animation above, our script loops over each of the shapes individually, performs shape detection on each one, and then draws the name of the shape on the object.
Determining object shape using feature extraction and machine learning
This post demonstrated how simple contour properties, including contour detection, contour approximation, and examining the number of points in a contour, can be used to recognize shapes in an image.
However, there are more advanced shape detection techniques. These methods utilize feature extraction/image descriptors and are used to quantify the shape in an image using a list of numbers (i.e., a “feature vector”).
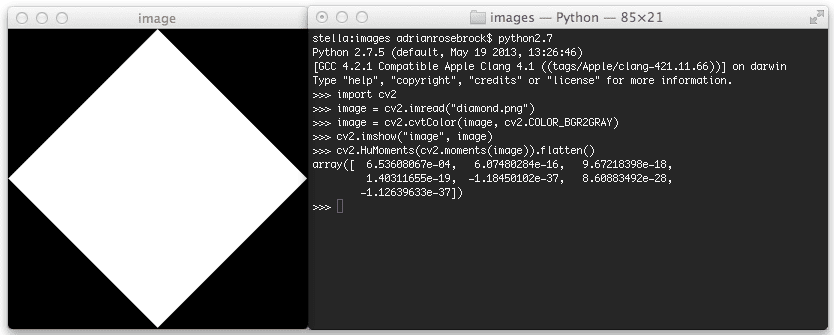
The first method you should look into is the classic Hu moments shape descriptor. Hu moments are built into the OpenCV library via the cv2.HuMoments function. The result of applying cv2.HuMoments is a list of seven numbers used to quantify the shape in an image.
We then have Zernike moments which build on the research and work from Hu moments. The result of applying Zernike moments is a list of 25 numbers used to quantify the shape in the image. Zernike moments tend to be a bit more powerful than Hu moments but may require some manual parameter tuning (in particular, the radius of the moments).
Can we use deep learning for shape recognition?
In short, yes, absolutely. Deep learning-based models excel and object and shape recognition. And if you’re working with simple shapes, then even a shallow CNN will likely outperform Hu moments, Zernike moments, and contour-based shape recognition methods — provided you have enough data to train the CNN, of course!
If you’re interested in learning how to train your own custom deep learning shape recognition algorithms, be sure you go through my deep learning courses inside PyImageSearch University.
What's next? We recommend PyImageSearch University.
86+ total classes • 115+ hours hours of on-demand code walkthrough videos • Last updated: April 2026
★★★★★ 4.84 (128 Ratings) • 16,000+ Students Enrolled
I strongly believe that if you had the right teacher you could master computer vision and deep learning.
Do you think learning computer vision and deep learning has to be time-consuming, overwhelming, and complicated? Or has to involve complex mathematics and equations? Or requires a degree in computer science?
That’s not the case.
All you need to master computer vision and deep learning is for someone to explain things to you in simple, intuitive terms. And that’s exactly what I do. My mission is to change education and how complex Artificial Intelligence topics are taught.
If you're serious about learning computer vision, your next stop should be PyImageSearch University, the most comprehensive computer vision, deep learning, and OpenCV course online today. Here you’ll learn how to successfully and confidently apply computer vision to your work, research, and projects. Join me in computer vision mastery.
Inside PyImageSearch University you'll find:
- ✓ 86+ courses on essential computer vision, deep learning, and OpenCV topics
- ✓ 86 Certificates of Completion
- ✓ 115+ hours hours of on-demand video
- ✓ Brand new courses released regularly, ensuring you can keep up with state-of-the-art techniques
- ✓ Pre-configured Jupyter Notebooks in Google Colab
- ✓ Run all code examples in your web browser — works on Windows, macOS, and Linux (no dev environment configuration required!)
- ✓ Access to centralized code repos for all 540+ tutorials on PyImageSearch
- ✓ Easy one-click downloads for code, datasets, pre-trained models, etc.
- ✓ Access on mobile, laptop, desktop, etc.
Summary
In today’s post blog, we learned how to perform shape detection with OpenCV and Python.
To accomplish this, we leveraged contour approximation, the process of reducing the number of points on a curve to a more simple approximated version.
Then, based on this contour approximation, we examined the number of vertices each shape has. Given the vertex count, we were able to accurately label each of the shapes.
This lesson is part of a three part series on shape detection and analysis. Last week we covered how to compute the center of a contour. Today we covered shape detection with OpenCV. And next week we’ll discuss how to label the actual color of a shape using color channel statistics.
Be sure to enter your email address in the form below to be notified when the next post goes live — you won’t want to miss it!

Download the Source Code and FREE 17-page Resource Guide
Enter your email address below to get a .zip of the code and a FREE 17-page Resource Guide on Computer Vision, OpenCV, and Deep Learning. Inside you'll find my hand-picked tutorials, books, courses, and libraries to help you master CV and DL!

