In this tutorial, you will learn how to create U-Net, an image segmentation model in TensorFlow 2 / Keras. We will first present a brief introduction on image segmentation, U-Net architecture, and then walk through the code implementation with a Colab notebook.
To learn how to implement a U-Net with TensorFlow 2 / Keras, just keep reading.
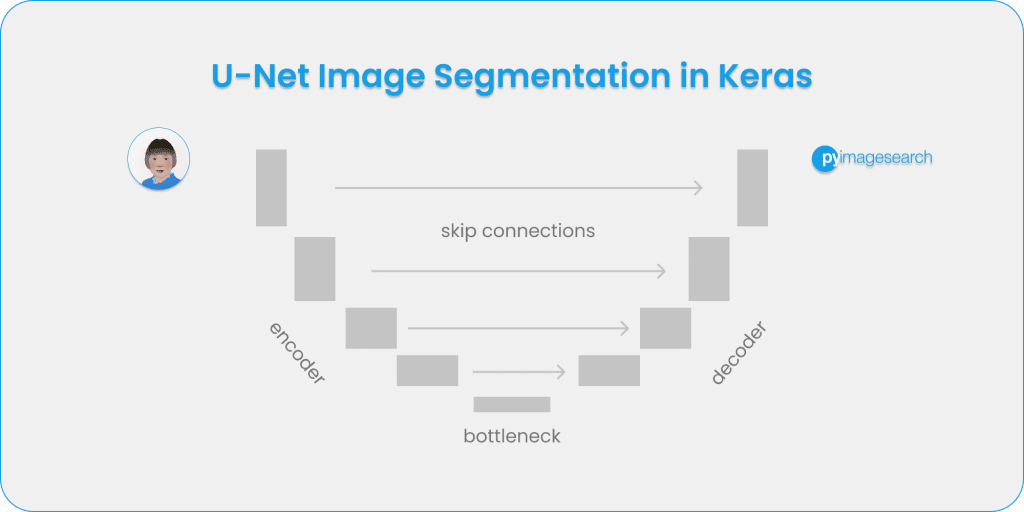
U-Net Image Segmentation in Keras
Image segmentation is a computer vision task that segments an image into multiple areas by assigning a label to every pixel of the image. It provides much more information about an image than object detection, which draws a bounding box around the detected object, or image classification, which assigns a label to the object.
Segmentation is useful and can be used in real-world applications such as medical imaging, clothes segmentation, flooding maps, self-driving cars, etc.
There are two types of image segmentation:
- Semantic segmentation: classify each pixel with a label.
- Instance segmentation: classify each pixel and differentiate each object instance.
U-Net is a semantic segmentation technique originally proposed for medical imaging segmentation. It’s one of the earlier deep learning segmentation models, and the U-Net architecture is also used in many GAN variants such as the Pix2Pix generator.
U-Net Architecture
U-Net was introduced in the paper, U-Net: Convolutional Networks for Biomedical Image Segmentation. The model architecture is fairly simple: an encoder (for downsampling) and a decoder (for upsampling) with skip connections. As Figure 1 shows, it shapes like the letter U hence the name U-Net.
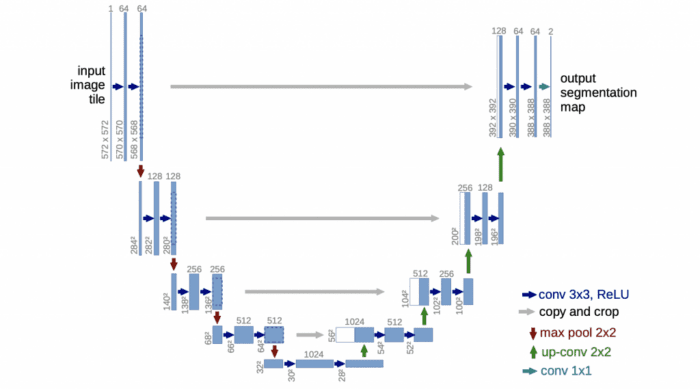
The gray arrows indicate the skip connections that concatenate the encoder feature map with the decoder, which helps the backward flow of gradients for improved training.
Now that we have a basic understanding of semantic segmentation and the U-Net architecture, let’s implement a U-Net with TensorFlow 2 / Keras. Please follow the tutorial below with this Colab notebook.
Setup
We will be using Colab for model training, so make sure you set “Hardware accelerator” to “GPU under Runtime / change runtime type.” Then import the libraries and packages this project depends on:
import tensorflow as tf from tensorflow import keras from tensorflow.keras import layers import tensorflow_datasets as tfds import matplotlib.pyplot as plt import numpy as np
Dataset
We will use the Oxford-IIIT pet dataset, available as part of the TensorFlow Datasets (TFDS). It can be easily loaded with TFDS, and then with a bit of data preprocessing, ready for training segmentation models.
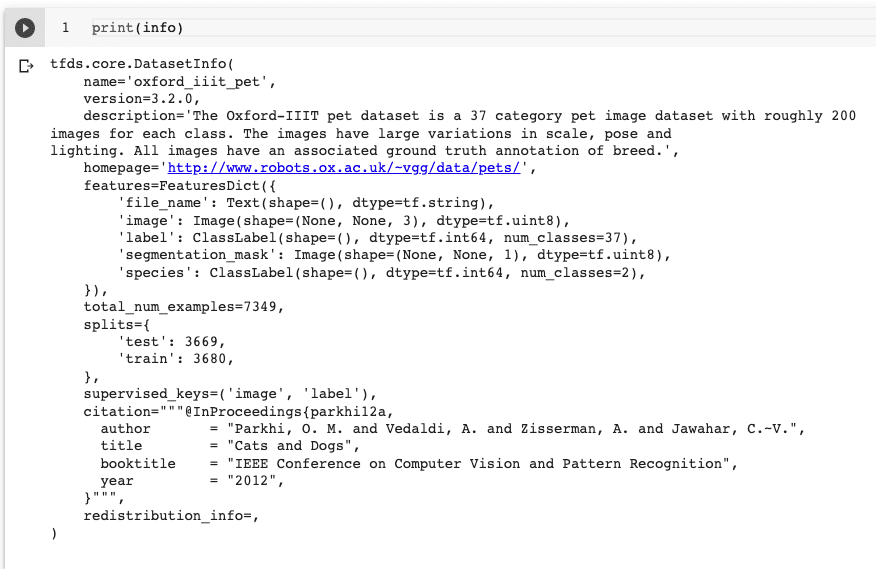
With just one line of code, we can use tfds to load the dataset by specifying the name of the dataset, and get the dataset info by setting with_info=True:
dataset, info = tfds.load('oxford_iiit_pet:3.*.*', with_info=True)
Print the dataset info with print(info), and we will see all kinds of detailed information about the Oxford pet dataset. For example, in Figure 2, we can see there are a total of 7349 images with a built-in test/train split.
Let’s first make a few changes to the downloaded data before we start training U-Net with it.
First, we need to resize the images and masks to 128x128:
def resize(input_image, input_mask): input_image = tf.image.resize(input_image, (128, 128), method="nearest") input_mask = tf.image.resize(input_mask, (128, 128), method="nearest") return input_image, input_mask
We then create a function to augment the dataset by flipping them horizontally:
def augment(input_image, input_mask):
if tf.random.uniform(()) > 0.5:
# Random flipping of the image and mask
input_image = tf.image.flip_left_right(input_image)
input_mask = tf.image.flip_left_right(input_mask)
return input_image, input_mask
We create a function to normalize the dataset by scaling the images to the range of [-1, 1] and decreasing the image mask by 1:
def normalize(input_image, input_mask): input_image = tf.cast(input_image, tf.float32) / 255.0 input_mask -= 1 return input_image, input_mask
We create two functions to preprocess the training and test datasets with a slight difference between the two – we only perform image augmentation on the training dataset.
def load_image_train(datapoint): input_image = datapoint["image"] input_mask = datapoint["segmentation_mask"] input_image, input_mask = resize(input_image, input_mask) input_image, input_mask = augment(input_image, input_mask) input_image, input_mask = normalize(input_image, input_mask) return input_image, input_mask def load_image_test(datapoint): input_image = datapoint["image"] input_mask = datapoint["segmentation_mask"] input_image, input_mask = resize(input_image, input_mask) input_image, input_mask = normalize(input_image, input_mask) return input_image, input_mask
Now we are ready to build an input pipeline with tf.data by using the map() function:
train_dataset = dataset["train"].map(load_image_train, num_parallel_calls=tf.data.AUTOTUNE) test_dataset = dataset["test"].map(load_image_test, num_parallel_calls=tf.data.AUTOTUNE)
If we execute print(train_dataset), we will notice that the image is in the shape of 128x128x3 of tf.float32 while the image mask is in the shape of 128x128x1 with the data type of tf.uint8.
We define a batch size of 64 and a buffer size of 1000 for creating batches of training and test datasets. With the original TFDS dataset, there are 3680 training samples and 3669 test samples, which are further split into validation/test sets. We will use the train_batches and the validation_batches for training the U-Net model. After the training finishes, we will then use the test_batches to test the model predictions.
BATCH_SIZE = 64 BUFFER_SIZE = 1000 train_batches = train_dataset.cache().shuffle(BUFFER_SIZE).batch(BATCH_SIZE).repeat() train_batches = train_batches.prefetch(buffer_size=tf.data.experimental.AUTOTUNE) validation_batches = test_dataset.take(3000).batch(BATCH_SIZE) test_batches = test_dataset.skip(3000).take(669).batch(BATCH_SIZE)
Now the datasets are ready for training. Let’s visualize a random sample image and its mask from the training dataset, to get an idea of how the data looks.
def display(display_list):
plt.figure(figsize=(15, 15))
title = ["Input Image", "True Mask", "Predicted Mask"]
for i in range(len(display_list)):
plt.subplot(1, len(display_list), i+1)
plt.title(title[i])
plt.imshow(tf.keras.utils.array_to_img(display_list[i]))
plt.axis("off")
plt.show()
sample_batch = next(iter(train_batches))
random_index = np.random.choice(sample_batch[0].shape[0])
sample_image, sample_mask = sample_batch[0][random_index], sample_batch[1][random_index]
display([sample_image, sample_mask])
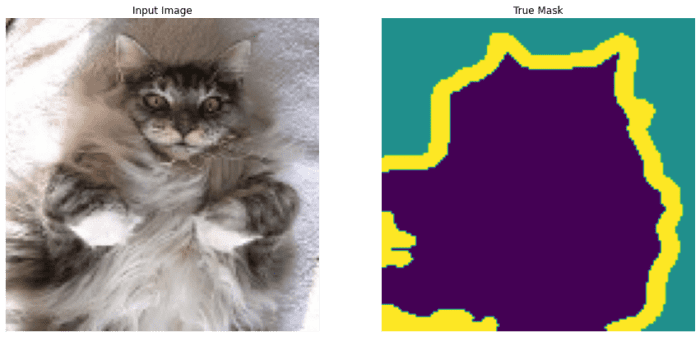
The sample input image of a cat is in the shape of 128x128x3. The true mask has three segments: the green background; the purple foreground object, in this case, a cat; and the yellow outline. Figure 3 shows both the original input image and the true mask image.
Model Architecture
Now that we have the data ready for training, let’s define the U-Net model architecture. As mentioned earlier, the U-Net is shaped like a letter U with an encoder, decoder, and the skip connections between them. So we will create a few building blocks to make the U-Net model.
Building blocks
First, we create a function double_conv_block with layers Conv2D-ReLU-Conv2D-ReLU, which we will use in both the encoder (or the contracting path) and the bottleneck of the U-Net.
def double_conv_block(x, n_filters): # Conv2D then ReLU activation x = layers.Conv2D(n_filters, 3, padding = "same", activation = "relu", kernel_initializer = "he_normal")(x) # Conv2D then ReLU activation x = layers.Conv2D(n_filters, 3, padding = "same", activation = "relu", kernel_initializer = "he_normal")(x) return x
Then we define a downsample_block function for downsampling or feature extraction to be used in the encoder.
def downsample_block(x, n_filters): f = double_conv_block(x, n_filters) p = layers.MaxPool2D(2)(f) p = layers.Dropout(0.3)(p) return f, p
Finally, we define an upsampling function upsample_block for the decoder (or expanding path) of the U-Net.
def upsample_block(x, conv_features, n_filters): # upsample x = layers.Conv2DTranspose(n_filters, 3, 2, padding="same")(x) # concatenate x = layers.concatenate([x, conv_features]) # dropout x = layers.Dropout(0.3)(x) # Conv2D twice with ReLU activation x = double_conv_block(x, n_filters) return x
U-Net Model
There are three options for making a Keras model, as well explained in Adrian’s blog and the Keras documentation:
SequentialAPI: easiest and beginner-friendly, stacking the layers sequentially.- Functional API: more flexible and allows non-linear topology, shared layers, and multiple inputs or multi-outputs.
Modelsubclassing: most flexible and best for complex models that need custom training loops.
U-Net has a fairly simple architecture; however, to create the skip connections between the encoder and decoder, we will need to concatenate some layers. So the Keras Functional API is most appropriate for this purpose.
First, we create a build_unet_model function, specify the inputs, encoder layers, bottleneck, decoder layers, and finally the output layer with Conv2D with activation of softmax. Note the input image shape is 128x128x3. The output has three channels corresponding to the three classes that the model will classify each pixel for: background, foreground object, and object outline.
# inputs inputs = layers.Input(shape=(128,128,3)) # encoder: contracting path - downsample # 1 - downsample f1, p1 = downsample_block(inputs, 64) # 2 - downsample f2, p2 = downsample_block(p1, 128) # 3 - downsample f3, p3 = downsample_block(p2, 256) # 4 - downsample f4, p4 = downsample_block(p3, 512) # 5 - bottleneck bottleneck = double_conv_block(p4, 1024) # decoder: expanding path - upsample # 6 - upsample u6 = upsample_block(bottleneck, f4, 512) # 7 - upsample u7 = upsample_block(u6, f3, 256) # 8 - upsample u8 = upsample_block(u7, f2, 128) # 9 - upsample u9 = upsample_block(u8, f1, 64) # outputs outputs = layers.Conv2D(3, 1, padding="same", activation = "softmax")(u9) # unet model with Keras Functional API unet_model = tf.keras.Model(inputs, outputs, name="U-Net") return unet_model
We call the build_unet_model function to create the model unet_model:
unet_model = build_unet_model()
And we can visualize the model architecture with model.summary() to see each detail of the model. And we can use a Keras utils function called plot_model to generate a more visual diagram, including the skip connections. The generated image generated in Colab is rotated 90 degrees so that you can see U-shaped architecture in Figure 4 (see the details better in the Colab notebook):
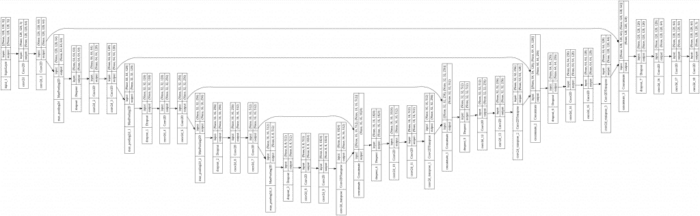
plot_model (image by the author).Compile and Train U-Net
To compile unet_model, we specify the optimizer, the loss function, and the accuracy metrics to track during training:
unet_model.compile(optimizer=tf.keras.optimizers.Adam(),
loss="sparse_categorical_crossentropy",
metrics="accuracy")
We train the unet_model by calling model.fit() and training it for 20 epochs.
NUM_EPOCHS = 20
TRAIN_LENGTH = info.splits["train"].num_examples
STEPS_PER_EPOCH = TRAIN_LENGTH // BATCH_SIZE
VAL_SUBSPLITS = 5
TEST_LENTH = info.splits["test"].num_examples
VALIDATION_STEPS = TEST_LENTH // BATCH_SIZE // VAL_SUBSPLITS
model_history = unet_model.fit(train_batches,
epochs=NUM_EPOCHS,
steps_per_epoch=STEPS_PER_EPOCH,
validation_steps=VALIDATION_STEPS,
validation_data=test_batches)
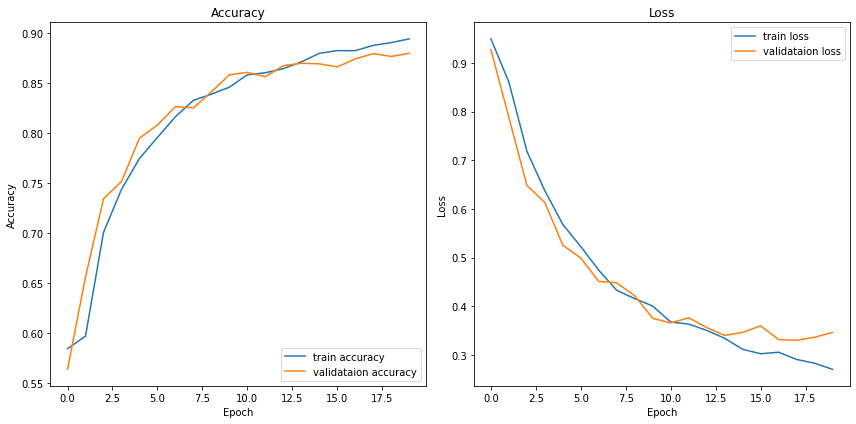
After training for 20 epochs, we get a training accuracy and a validation accuracy of ~0.88. The learning curve during training indicates that the model is doing well on both the training dataset and validation set, which indicates the model is generalizing well without much overfitting (Figure 5).
Prediction
Now that we have completed training the unet_model, let’s use it to make predictions on a few sample images of the test dataset.
def create_mask(pred_mask):
pred_mask = tf.argmax(pred_mask, axis=-1)
pred_mask = pred_mask[..., tf.newaxis]
return pred_mask[0]
def show_predictions(dataset=None, num=1):
if dataset:
for image, mask in dataset.take(num):
pred_mask = unet_model.predict(image)
display([image[0], mask[0], create_mask(pred_mask)])
else:
display([sample_image, sample_mask,
create_mask(model.predict(sample_image[tf.newaxis, ...]))])
count = 0
for i in test_batches:
count +=1
print("number of batches:", count)
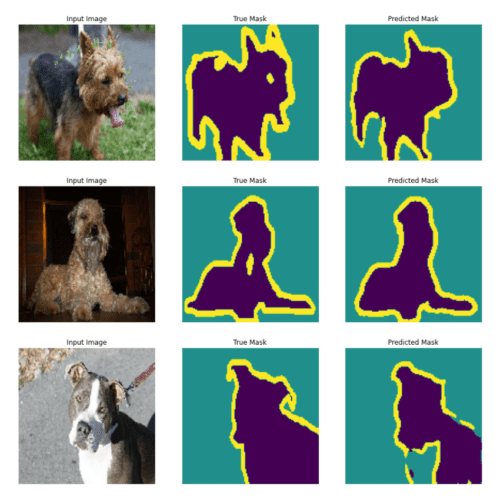
See Figure 6 for the input images, the true masks, and the masks predicted by the U-Net model we trained.
What's next? We recommend PyImageSearch University.

86+ total classes • 115+ hours hours of on-demand code walkthrough videos • Last updated: April 2026
★★★★★ 4.84 (128 Ratings) • 16,000+ Students Enrolled
I strongly believe that if you had the right teacher you could master computer vision and deep learning.
Do you think learning computer vision and deep learning has to be time-consuming, overwhelming, and complicated? Or has to involve complex mathematics and equations? Or requires a degree in computer science?
That’s not the case.
All you need to master computer vision and deep learning is for someone to explain things to you in simple, intuitive terms. And that’s exactly what I do. My mission is to change education and how complex Artificial Intelligence topics are taught.
If you're serious about learning computer vision, your next stop should be PyImageSearch University, the most comprehensive computer vision, deep learning, and OpenCV course online today. Here you’ll learn how to successfully and confidently apply computer vision to your work, research, and projects. Join me in computer vision mastery.
Inside PyImageSearch University you'll find:
- ✓ 86+ courses on essential computer vision, deep learning, and OpenCV topics
- ✓ 86 Certificates of Completion
- ✓ 115+ hours hours of on-demand video
- ✓ Brand new courses released regularly, ensuring you can keep up with state-of-the-art techniques
- ✓ Pre-configured Jupyter Notebooks in Google Colab
- ✓ Run all code examples in your web browser — works on Windows, macOS, and Linux (no dev environment configuration required!)
- ✓ Access to centralized code repos for all 540+ tutorials on PyImageSearch
- ✓ Easy one-click downloads for code, datasets, pre-trained models, etc.
- ✓ Access on mobile, laptop, desktop, etc.
Summary
In this post, you have learned how to load the Oxford-IIIT pet data with the TensorFlow dataset and how to train an image segmentation U-Net model from scratch. We created the U-Net with Keras Functional API and visualized the U-shaped architecture with skip connections. This post has been inspired by the official TensorFlow.org image segmentation tutorial and the U-Net tutorial on Keras.io, which uses keras.utils.Sequence for loading the data and has an Xception-style U-Net architecture. U-Net is a great start for learning semantic segmentation on images. To learn more about this topic, read segmentation papers on modern models such as DeepLab V3, HRNet, U2-Net, etc., among many other papers.
Citation Information
Maynard-Reid, M. “U-Net Image Segmentation in Keras,” PyImageSearch, 2022, https://pyimg.co/6m5br
@article{Maynard-Reid_2022_U-Net,
author = {Margaret Maynard-Reid},
title = {{U-Net} Image Segmentation in Keras},
journal = {PyImageSearch},
year = {2022},
note = {https://pyimg.co/6m5br},
}

Unleash the potential of computer vision with Roboflow - Free!
- Step into the realm of the future by signing up or logging into your Roboflow account. Unlock a wealth of innovative dataset libraries and revolutionize your computer vision operations.
- Jumpstart your journey by choosing from our broad array of datasets, or benefit from PyimageSearch’s comprehensive library, crafted to cater to a wide range of requirements.
- Transfer your data to Roboflow in any of the 40+ compatible formats. Leverage cutting-edge model architectures for training, and deploy seamlessly across diverse platforms, including API, NVIDIA, browser, iOS, and beyond. Integrate our platform effortlessly with your applications or your favorite third-party tools.
- Equip yourself with the ability to train a potent computer vision model in a mere afternoon. With a few images, you can import data from any source via API, annotate images using our superior cloud-hosted tool, kickstart model training with a single click, and deploy the model via a hosted API endpoint. Tailor your process by opting for a code-centric approach, leveraging our intuitive, cloud-based UI, or combining both to fit your unique needs.
- Embark on your journey today with absolutely no credit card required. Step into the future with Roboflow.
To download the source code to this post (and be notified when future tutorials are published here on PyImageSearch), simply enter your email address in the form below!

Download the Source Code and FREE 17-page Resource Guide
Enter your email address below to get a .zip of the code and a FREE 17-page Resource Guide on Computer Vision, OpenCV, and Deep Learning. Inside you'll find my hand-picked tutorials, books, courses, and libraries to help you master CV and DL!

Comment section
Hey, Adrian Rosebrock here, author and creator of PyImageSearch. While I love hearing from readers, a couple years ago I made the tough decision to no longer offer 1:1 help over blog post comments.
At the time I was receiving 200+ emails per day and another 100+ blog post comments. I simply did not have the time to moderate and respond to them all, and the sheer volume of requests was taking a toll on me.
Instead, my goal is to do the most good for the computer vision, deep learning, and OpenCV community at large by focusing my time on authoring high-quality blog posts, tutorials, and books/courses.
If you need help learning computer vision and deep learning, I suggest you refer to my full catalog of books and courses — they have helped tens of thousands of developers, students, and researchers just like yourself learn Computer Vision, Deep Learning, and OpenCV.
Click here to browse my full catalog.