The latest release of dlib is special.
It completely removes the boost.python dependency, making it significantly easier to install across the board on macOS, Ubuntu, and Raspbian.
Thanks to the work of Davis King (the creator and maintainer of the dlib library) and Mischan Toos-Haus (who is responsible for removing the boost.python dependency), we can now:
- Easily leverage all Python + dlib functionality (face detection, facial landmarks, correlation tracking, etc.)…
- …with less dependencies and an easier install process.
In today’s blog post I’ll be providing instructions to install dlib on:
- macOS
- Ubuntu
- Raspbian (Raspberry Pi’s operating system)
These install instructions are complete, easy, to follow, and will get you up and running with dlib + Python bindings in a manner of minutes.
To learn how to install dlib on your system, just keep reading!
Install dlib (the easy, complete guide)
In this guide you’ll learn how to install dlib on macOS, Ubuntu, and Raspbian. Please feel free to skip to the section that corresponds to your operating system.
Once you have installed dlib on your respective operating system we’ll validate the install by using Python, dlib, and OpenCV (provided you have OpenCV installed as well), to detect facial landmarks.
From there, I have provided additional tutorials and guides to help apply dlib to computer vision and machine learning projects, including detecting and counting blinks and building a system to recognize when the driver of a vehicle is becoming drowsy/tired (and alerting them to wake up).
Installing dlib on macOS
I’ll assume you already have XCode installed on your macOS machine. If not, please take the time to open the App Store and install XCode.
From there, you’ll need to install Homebrew, a package manager for macOS, similar to Debian/Ubuntu’s apt-get :
$ ruby -e "$(curl -fsSL https://raw.githubusercontent.com/Homebrew/install/master/install)" $ brew update
Note: Make sure you use the “<>” button in the code block above to expand section — this will ensure you copy and paste the entire Homebrew install command.
Once Homebrew is installed you need to update your PATH to look for Homebrew binaries, packages, and libraries. This can be accomplished by manually editing the file using an editor such as nano, vi, etc. or simply using echo and redirection:
$ echo -e "\n# Homebrew" >> ~/.bash_profile $ echo "export PATH=/usr/local/bin:$PATH" >> ~/.bash_profile
You then need to source the ~/.bash_profile file to reload the changes:
$ source ~/.bash_profile
We’ll then install cmake (a utility used for building, testing, and packaging software) along with Python 2.7 and Python 3:
$ brew install cmake $ brew install python python3
You can verify that Python 2.7 and Python 3 have been successfully installed by using which :
$ which python2 /usr/local/bin/python2 $ which python3 /usr/local/bin/python3
There are two key points you need to pay attention to here.
The first is that you want to ensure the root path for both Python binaries are in /usr/local/bin — this is where Homebrew stores the Python binaries.
If your root path instead reads /usr/bin then you are utilizing the system Python install. We want to avoid using the system Python install so if you see /usr/bin instead of /usr/local/bin then it’s most likely due to an error updating your ~/.bash_profile (make sure you go back and ensure the file has been updated properly; this could require manually opening and editing the file).
The second key point to investigate is the Python binary itself: python2 and python3 . Notice how we are not executing just python — instead we are explicitly supplying the version as well.
This is due to how Homebrew now handles Python installs. In older versions of Homebrew, Homebrew would automatically alias the python command to either Python 2.7 or Python 3 — this is no longer the case. Instead, we need to explicitly supply the Python version number.
The name is true for pip as well: we now use pip2 and pip3 .
Next, let’s prepare our Python environment.
If you are using a Python virtual environment (if you followed any of my OpenCV install tutorials, you likely are using them), you can either create a new Python virtual environment for the dlib install:
$ mkvirtualenv dlib_test -p python3
Or access an existing one:
$ workon cv
Using a Python virtual environment is entirely optional but highly recommended as Python virtual environments are a best practice for Python development. To learn more about Python virtual environments (and how to use them) please consult my OpenCV install tutorials where they are covered extensively.
From there, we can install NumPy (dlib’s only Python dependency) followed by the dlib library itself:
$ pip install numpy $ pip install dlib
If you are not using Python virtual environments you’ll need to update the pip command to either pip2 or pip3 . If you are using Python 2.7, use pip2 instead of pip . Similarly, if you are utilizing Python 3, replace pip with pip3 .
From there, fire up a Python shell and validate your install of dlib:
(dlib_test) DU481:~ admin$ python Python 3.6.4 (default, Jan 6 2018, 11:51:15) [GCC 4.2.1 Compatible Apple LLVM 9.0.0 (clang-900.0.39.2)] on darwin Type "help", "copyright", "credits" or "license" for more information. >>> import dlib >>> dlib.__version__ '19.8.2' >>>
Installing dlib on Ubuntu
The following instructions were gathered on Ubuntu 16.04 but should work on newer versions of Ubuntu as well.
To get started, let’s install our required dependencies:
$ sudo apt-get update $ sudo apt-get install build-essential cmake $ sudo apt-get install libopenblas-dev liblapack-dev $ sudo apt-get install libx11-dev libgtk-3-dev $ sudo apt-get install python python-dev python-pip $ sudo apt-get install python3 python3-dev python3-pip
I have included a few notes on the dependencies that you should consider:
- We are installing GTK and X11 for GUI functionality inside dlib. These libraries can be skipped if you do not care about the GUI functionality, saving you 100-200MB in space.
- We install OpenBLAS for linear algebra optimizations which allows dlib functionality to execute faster. You can technically skip this as well but I highly recommend you install OpenBLAS as the optimizations are significant.
Next, let’s prepare our Python environment for the dlib install.
If you are using a Python virtual environment (if you followed any of my OpenCV install tutorials, you likely are using them), you can either create a new Python virtual environment for the dlib install:
$ mkvirtualenv dlib_test -p python3
Or access an existing one:
$ workon cv
Using a Python virtual environment is entirely optional but highly recommended as Python virtual environments are a best practice for Python development. To learn more about Python virtual environments (and how to use them) please consult my OpenCV install tutorials where they are covered extensively.
You can then install dlib on your Ubuntu system:
$ pip install numpy $ pip install dlib
If you are not using a Python virtual environment make sure you add sudo to the beginning of the pip install commands (otherwise the pip install commands will fail due permission errors). Additionally, keep in mind that pip is used to install packages for Python 2.7 and pip3 is used for Python 3. Depending on which Python version you want to install dlib for you may need to update the pip command above.
Finally, open up a Python shell and verify your dlib install on Ubuntu by importing the dlib library:
(dlib_test) ubuntu@ip-172-31-12-187:~$ python Python 3.5.2 (default, Nov 23 2017, 16:37:01) [GCC 5.4.0 20160609] on linux Type "help", "copyright", "credits" or "license" for more information. >>> import dlib >>> dlib.__version__ '19.8.2' >>>
Installing dlib on Raspberry Pi/Raspbian
This section covers installing the dlib library on the Raspberry Pi and the Raspbian Stretch operating system. These instructions should work for newer releases of Rasbpian as well.
Our Raspbian dlib install is identical to our Ubuntu dlib install, but with a few minor adjustments:
- Both Python 2.7 and Python 3 are pre-installed on Raspbian so we do not need to install them ourselves.
- We need to install
libatlas-base-dev. - We can optionally optimize our dlib install on the Raspberry Pi architecture via the
USE_NEON_INSTRUCTIONSswitch (this will require you install dlib from source rather thanpip).
Let’s get started installing dlib on our Raspberry Pi by ensuring we have met our library/package dependencies:
$ sudo apt-get update $ sudo apt-get install build-essential cmake $ sudo apt-get install libopenblas-dev liblapack-dev libatlas-base-dev $ sudo apt-get install libx11-dev libgtk-3-dev
A few quick notes on both X11/GTK and OpenBLAS:
- We are installing GTK and X11 for GUI functionality inside dlib. These libraries can be skipped if you do not care about the GUI functionality, saving you 100-200MB in space. Space can be a premium on the Raspberry Pi, but again, if you need GUI functionality make sure you install them.
- We install OpenBLAS for linear algebra optimizations which allows dlib functionality to execute faster. You can technically skip this as well but I highly recommend you install OpenBLAS as the optimizations are significant — any optimization you can achieve on the Raspberry Pi is well worth it!
Next, let’s prepare our Python environment for the dlib install on our Raspberry Pi.
If you are using a Python virtual environment (if you followed any of my OpenCV install tutorials, you likely are using them), you can either create a new Python virtual environment for the dlib install:
$ mkvirtualenv dlib_test -p python3
Or access an existing one:
$ workon cv
Using a Python virtual environment is entirely optional but highly recommended as Python virtual environments are a best practice for Python development. To learn more about Python virtual environments (and how to use them) please consult my OpenCV install tutorials where they are covered extensively.
We can then install dlib on Raspberry Pi:
$ pip install numpy $ pip install dlib
If you are not using a Python virtual environment make sure you add sudo to the beginning of the pip install commands (otherwise the pip install commands will fail due permission errors). Additionally, keep in mind that pip is used to install packages for Python 2.7 and pip3 is used for Python 3. Depending on which Python version you want to install dlib for you may need to update the pip command above.
If you decide you would like to have the NEON instructions utilized to optimize the dlib install, skip installing dlib via pip and instead install via source:
$ git clone https://github.com/davisking/dlib.git $ cd dlib $ python setup.py install --yes USE_NEON_INSTRUCTIONS
Compiling from source will take longer than installing via pip so be patient.
Finally, open up a Python shell and verify your dlib install on Raspbian by importing the dlib library:
(dlib_test) pi@raspberrypi:~ $ python Python 3.5.3 (default, Jan 19 2017, 14:11:04) [GCC 6.3.0 20170124] on linux Type "help", "copyright", "credits" or "license" for more information. >>> import dlib >>> dlib.__version__ '19.8.99'
Note: The dlib install version for the Raspberry Pi is different from my macOS and Ubuntu output as I installed from source to leverage the NEON optimizations rather than installing via pip.
Testing your dlib install
As a final example of using dlib on the Raspberry Pi, here is a short example I put together where we detect facial landmarks in an input image:
# import the necessary packages
from imutils import face_utils
import dlib
import cv2
# initialize dlib's face detector (HOG-based) and then create
# the facial landmark predictor
p = "shape_predictor_68_face_landmarks.dat"
detector = dlib.get_frontal_face_detector()
predictor = dlib.shape_predictor(p)
# load the input image and convert it to grayscale
image = cv2.imread("example.jpg")
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# detect faces in the grayscale image
rects = detector(gray, 0)
# loop over the face detections
for (i, rect) in enumerate(rects):
# determine the facial landmarks for the face region, then
# convert the facial landmark (x, y)-coordinates to a NumPy
# array
shape = predictor(gray, rect)
shape = face_utils.shape_to_np(shape)
# loop over the (x, y)-coordinates for the facial landmarks
# and draw them on the image
for (x, y) in shape:
cv2.circle(image, (x, y), 2, (0, 255, 0), -1)
# show the output image with the face detections + facial landmarks
cv2.imshow("Output", image)
cv2.waitKey(0)
Note: This example assumes you have both OpenCV and dlib installed on your system. If you do not have OpenCV installed, please refer to my OpenCV install tutorials.
For a detailed review of the code above used for facial landmark prediction, please refer to my previous tutorial on the basics of facial landmarks.
To execute the above script:
- Make sure you have installed OpenCV, dlib, and imutils (
pip install --upgrade imutils). - Use the “Downloads” section below to download the source code + example image + pre-trained dlib facial landmark predictor.
From there, you can issue the following command to execute our example script:
$ python facial_landmarks.py
You should then see the following output where the facial landmarks are displayed on the image:
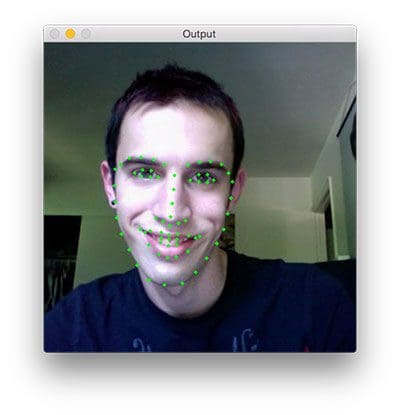
Fun fact: The picture above is me ~8 years ago during my undergraduate college days. I actually had hair back then!
What now?
Now that you’re up and running with dlib I would recommend you:
- Install OpenCV on your system as well (if you haven’t already). I have a number of OpenCV install tutorials for macOS, Ubuntu, and Raspbian available here.
- Use your OpenCV + dlib install to build practical, real-world projects.
I would recommend starting with this tutorial where you’ll learn how to apply real-time facial landmark detection:
From there, you can utilize facial landmarks to build an eye blink detector:
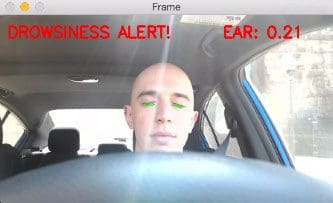
And then finally we put all the pieces together from the previous two tutorials to build a drowsiness detector:
Be sure to take a look at the tutorials! They are fun, hands-on, and will give you a ton of experience building real-world computer vision applications with dlib and OpenCV.
What's next? We recommend PyImageSearch University.

86+ total classes • 115+ hours hours of on-demand code walkthrough videos • Last updated: July 2026
★★★★★ 4.84 (128 Ratings) • 16,000+ Students Enrolled
I strongly believe that if you had the right teacher you could master computer vision and deep learning.
Do you think learning computer vision and deep learning has to be time-consuming, overwhelming, and complicated? Or has to involve complex mathematics and equations? Or requires a degree in computer science?
That’s not the case.
All you need to master computer vision and deep learning is for someone to explain things to you in simple, intuitive terms. And that’s exactly what I do. My mission is to change education and how complex Artificial Intelligence topics are taught.
If you're serious about learning computer vision, your next stop should be PyImageSearch University, the most comprehensive computer vision, deep learning, and OpenCV course online today. Here you’ll learn how to successfully and confidently apply computer vision to your work, research, and projects. Join me in computer vision mastery.
Inside PyImageSearch University you'll find:
- ✓ 86+ courses on essential computer vision, deep learning, and OpenCV topics
- ✓ 86 Certificates of Completion
- ✓ 115+ hours hours of on-demand video
- ✓ Brand new courses released regularly, ensuring you can keep up with state-of-the-art techniques
- ✓ Pre-configured Jupyter Notebooks in Google Colab
- ✓ Run all code examples in your web browser — works on Windows, macOS, and Linux (no dev environment configuration required!)
- ✓ Access to centralized code repos for all 540+ tutorials on PyImageSearch
- ✓ Easy one-click downloads for code, datasets, pre-trained models, etc.
- ✓ Access on mobile, laptop, desktop, etc.
Summary
In today’s blog post you learned how to install dlib on macOS, Ubuntu, and Raspbian.
Thanks to the work of Davis King and Mischan Toos-Haus it is now easier than ever to install dlib, requiring less dependencies and a faster pip install process.
Take a second now to give both Davis and Mischan a huge thanks for their hard work and their contributions to the open source community.
I hope you enjoyed this blog post! To be notified when future PyImageSearch tutorials are published, be sure to enter your email address in the form below.

Download the Source Code and FREE 17-page Resource Guide
Enter your email address below to get a .zip of the code and a FREE 17-page Resource Guide on Computer Vision, OpenCV, and Deep Learning. Inside you'll find my hand-picked tutorials, books, courses, and libraries to help you master CV and DL!

Dear Dr Adrian,
For those with MS Operating systems, it is easy to install It assumes that your Python system has been installed.
* Open a DOS shell
* type the following command:
pip install dlib
* suppose you are in the python shell, say in the MS version, “Idle”, type:
import dlib
dlib.__version__
‘19.4.0’
Regards
Anthony of Sydney
Thanks for sharing, Anthony! 🙂
Thank you!
Although I had to use “pip install cmake” and install “Visual C++ 2015 Build Tools” first, but it worked out in the end 🙂
Where did you find the “Visual C++ 2015 Build Tools” ??
Hi Adrian,
I tried to use “pip install dlib” and successfully download dlib, but I got cmake error (Could NOT find Threads (missing: Threads_FOUND). Is there any method I can take to solve this issue?
Thanks.
Hey Steven — which operating system are you on?
I use Mac OSX.
Thanks for the extra information, Steven. Unfortunately I’m not sure what would be causing that error. I would suggest posting on the official dlib GitHub Issues page where the developers can likely offer more insight.
Thanks for your reply. I’ll try to report that.
Thanks for the update Adrain.
Happy to share, Nuel! 🙂
The easiest installation ever: With Anaconda. Python 3.6 and Ubuntu 16.04, I’ve installed dlib and pre-built opencv-contrib-python 3.4.0.12 using pip. Your facial_landmarks.py run just fine.
Congrats on getting up and running with dlib and OpenCV, Emanuel! Nice job.
Traceback (most recent call last):
File “facial_landmarks.py”, line 5, in
from imutils import face_utils
ImportError: No module named ‘imutils
I get this error when i run python facial_landmarks.py
any help?
You need to install the “imutils” library:
$ pip install imutilsthanks!!!!
Dr.Adrian,
I have installed dlib as you instructed.
I am getting version of dlib in interpreter as well.
But When I’m running test program, facial_landmarks.py I am getting this
Traceback (most recent call last):
File “dlibdemo.py”, line 10, in
predictor = dlib.shape_predictor(p)
RuntimeError: Unable to open shape_predictor_68_face_landmarks.dat
Thanks in advance
You need to use the “Downloads” section of this blog post to download the source code + shape_predictor_68_face_landmarks.dat file. From there, change directory to the download location and execute the facial landmarks script.
I installed imutils and got :
error: could not create ‘/usr/local/lib/python2.7/dist-packages/imutils’: Permission denied
Why permission denied?
If you’re installing imutils (or any other packages) in the site-packages directory of the system Python install you need sudo permission:
$ sudo pip install imutilsI want to use dlib’s gui features, like image_window(). I didn’t see any way to do it without building it myself It’s not too bad, I’m on Mac OS X, here’s what I did:
brew cask install xquartz
git clone https://github.com/davisking/dlib.git
cd dlib
mkdir build
cd build
cmake –build .
Then, in your virtualenv shell:
cd dlib
python setup.py install
Awesome, thanks for sharing Curtis!
hello I followed the steps and installed dlib in a virtual environment with opencv 3.3 ( ubuntu 16.04) ,the Dlib installation indicates successful installation but when importing dlib the module is not found, What could be the problem?
screenshot
http://i68.tinypic.com/20f6byo.png
thanks
Look at your “pip freeze” it appears that dlib is not actually installed. Make sure you run:
$ pip install dlibAnd ensure the compile + install process completes successfully.
I have installed the dlib and checked through the python shell through import dlib and it’s there but when I created a .py file inside the virtual environment and imported it ,it’s not there
Thank you for the blog post. Dlib is cool. I was wondering what is the best way to capture the mouth area (between the lips) using opencv/dlib?
Example app: when a user opens their mouth, I would like to color the mouth green for example.
One approach is to put a rectangle around the mouth region and use threshholding and find contours (largest = mouth?). What approach do you recommend?
You could compute the convex hull of the mouth region. This would give you the complete area of the mouth.
any ideas on how to get dlib up and running on windows. followed the steps to get dlib for windows but even after successful installation the program doesnt seem to execute. throws error with the dlib library
Hey Ashwin, if you are having trouble installing or using dlib on Windows I would suggest posting on the dlib GitHub Issues page.
usage: detect_blinks.py [-h] -p SHAPE_PREDICTOR [-v VIDEO]
detect_blinks.py: error: argument -p/–shape-predictor is required
how to fix this?
Make sure you read up on command line arguments and you’ll be all set.
Hi Adrian,
I followed every step, and too the steps Opencv, but I had problem during “python facial_landmarks.py”. I receive the following message:
ImportError: No module named cv2
Help me, please.
It sounds like you do not have OpenCV installed on your system. Are you using Python virtual environments? If so, are you inside the environment? And did you install dlib into the Python virtual environment you used for OpenCV or a different one?
Hi Adiran,
When I using cmake to compile Dlib, how can I enable NEON optimization?
Thanks!
I believe it should be the
-mfpu=neonswitch but you should check the official dlib GitHub/documentation.Thank you so much Adrian..Installed dlib in my Raspberry Pi 3b+ successfully Using the swap method and it took me 75 mins to install.
Congrats on getting dlib installed on your Pi, Vamshi!
Hi Adrian
I have installed Ubuntu 16,04 in my system with no GPU support and I am trying to build dlib from source code as per the link
https://gist.github.com/ageitgey/629d75c1baac34dfa5ca2a1928a7aeaf
But whenever I am executing the command :-
python3 setup.py install –yes USE_AVX_INSTRUCTIONS –no DLIB_USE_CUDA
The system is getting hanged and I need to restart the system again.
Any help would be great
Regards
Akhil
Hey Akhil — it’s odd that your system is hanging. How much RAM does your system have? Is it a new-ish machine?
hi Adrian.thank you so much for your excellent post.please help me to install dlib package on windows.i can’t follow your posts cuz i can’t install dlib library on windows
Hey Reza, thanks for the comment; however, I must admit that I do not support Windows here on the PyImageSearch blog. If you are interested in computer vision and deep learning I would highly suggest you use a Unix-based machine such as Linux (Ubuntu) or macOS.
so there isn’t any solution for installing dlib library on windows?
Only unofficial ones.
Please specify some unofficial methods to install dlib on windows.
Hi,
Did anyone tried this for Windows 10, i am working on windows where python 2.7 is already installed. Please help how to install dlib??
How do I install this on virtual environment in linux without sudo?
You would launch a root shell and follow the same instructions only from the
/rootdirectory as your “home” directory.Can i know easier way to install dlib in my windows 10 system i already installed cmake pip installation
Make sure you see my reply to Ashwin.
Can u say, In total ubuntu 16.04 with tensorflow and dlib files uses how much space on the device ??
Hello – thanks very much for such a clear and easy-to-follow tutorial here. I tried doing the install from source so I could optimize for my Pi but ran into issues because I am running Python 3.7.0 – the compiler gave a number of deprecation warnings, some other notes and ultimately exited with status 2. I’ll spare you all the details here, but am curious if you have seen this process with with Python 3.7. (I’m very new to all things Raspberry Pi, linux, and a lot of this world so am learning quite a bit as I go.)
Hi Joe — I have not tried installing dlib via Python 3.7. I would recommend using Python 3.6 until other libraries catch up to Python 3.7.
For windows,
Make sure you have Visual Studio 2015/2017 installed
download and install cmake.exe (also install cmake by pip command)
Select you version from link below
cmake file link https://cmake.org/download/
then install dlib by pip
we need to install cmake because dlib is written in c++
I am using raspberry pi and I am new to it. i tried to install dlib just as you explained but its taking forever to install.
Are you compiling from source? If so, let your Raspberry Pi run overnight.
I have problems installing my dlib I’ve read your tutorial dlib. I did the same things but again I can’t setup dlib my system. I’m using windows10. I tried to install it on my linux machine. still could not install.
Hi Burak — I’m sorry to hear you are having issues installing dlib but please note that I do not officially support Windows here on the PyImageSearch blog. If you are having issues installing dlib in Windows you should post on their GitHub Issues page.
Hi Adrian,
i have already installed Opencv
and now i want to install dlib.
i followed the Instructions step by step on raspbian stretch but “building wheel for dlib (setup.py) …” is still running (since 10min)
i am in cv environment that i created (for OpenCV).
How is it take to build?
or i have to create a new environment and install dlib inside?
Depending on your system specs it may take awhile to compile dlib. Be patient.
I had success today on Windows 10 installing `dlib` into an Anaconda environment. I simply needed to use `conda-forge` as the repository, like so:
`$ conda install -c conda-forge dlib`
One thing I noticed, however, is that this pushed the numpy version down to 1.11.3 (current version is 1.16.2), so if you need any recent numpy features then be aware that this will limit you…
Confirmed. this worked for me as well. However, you must be on python3.6 and not python 3.7. Make sure to install numpy first. Then everything should be find.
Hi Adrian,
First of all thank you for al you do to provide these tutorials for us on pyimagesearch
I am having some issued getting dlib installed on my Raspberry Pi.
First I tried installing from source with the “python setup.py install –yes USE_NEON_INSTRUCTIONS” . However in their most recent release notes (http://dlib.net/release_notes.html) they removed the –yes option from install so that command keeps failing.
I tried pip install but it fails and then automatically tries to build from source which fails as will.
Lastly I just tried to build from source with only the instructions “python setup.py install”. It ran for a long time, got to 91% and then just froze. I tried to log in remotely to the pi and could not as it had disconnected even though the screen still showed connection.
I force restarted the pi and then tried to import dlib to test if it had installed. I am having this error:
AttributeError: module ‘dlib’ has no attribute ‘__version__’
Do you have any advice on how I could proceed?
Hi Adrian,
I just wanted to add that while installing from source on the Raspbian, I actually left it all night before it froze as I mentioned above.
Any help would be appreciated.
Thanks
Have you tried increasing your swap space? I discuss how to do that in this Raspberry Pi + OpenCV install post. You could do the same when installing dlib.
Hi Adrian,
Thank you so much
pip install eventually worked for me. I am sticking with that for now.
I may try installing from source later.
Also it seems with the current dlib release, there is no need to use ‘USE_NEON_INSTRUCTIONS’ anymore; as this is done automatically.
See here: https://twitter.com/nulhom/status/1108824939992436736
Thank you once again for being a great help.
Thanks for sharing, Simeon!
Hy Adrian, Hope you will be doing well.
I have installed Dlib on my system following that link.
https://github.com/davisking/dlib
But still dlib.DLIB_USE_CUDA returns False.
My system’s GPU supports cuda. I want to compile Dlib with cuda support? Actually, I am using CNN based face detector of dlib, and it is too slow on live video stream. Therefore I want to use Dlib with cuda support to make it fast.
Please help me to figure out mentioned issue.
What type of GPU are you using? Have you tried posting the problem on dlib’s GitHub Issues page as well?
I am using Nvidia 64MB GPU. .
No, I haven’t post it on dlib forum.
Is it possible to help me out, if yes, please let me know?
Which specific model GPU? Without knowing more information I cannot provide any suggestions. I would strongly encourage you to post on dlib’s GitHub Issues page and include as much information on your system, GPU, and install process as possible.
Ok sure I will post the issue on dlib’s github issue page. Btw, I am using Geforce GTX 1080 . . .
I am trying to install dlib onto an RPI 3 B+ with a 64GB micro SD card, used your instructions to install OpenCV 4. But every time I go for the dlib install it for Python 3 (with pip3) it either freezes (the clock stopped at 23:34 last night) or the wheels fail to install. Thoughts?
It sounds like the Pi is definitely locking up. Have you increased your swap size?
I too have had trouble all day with the same hardware setup, except for a 32GB micro SD card. Both the dlib source compile and the pip install freezes, and the RPi hands and kick my session out (both SSH and VNC). I have to reboot.
Pip freeze shows that dlib is not installed. I’ve been using all your other libraries and samples before I got to your dlib examples. I’ll try one more time, otherwise I will need to abandon the dlib work for now.
I am using Raspbian Stretch 2018-06-27, and the python virtual environment, and pip installed:
imutils==0.5.2
numpy==1.16.3
opencv-contrib-python==3.4.4.19
picamera==1.13
And yes, swap size is 2048.
OK, I also had the same problems on RPi for a while, until I read all the comment threads and other install blogs by Adrian. I finally got dlib to install by pip (in May 2019) after I updated pip, updated imutils, increased the swap space. I was surprised I had to update pip and imutils since it was only 5 days since I first installed all these and other tools to run Adrian’s other demos.
In FEDORA LINUX 30 the only way it worked for me was using CONDA:
conda create -n dlib_test
conda activate dlib_test
conda install menpo dlib
It finally worked!
Thanks for sharing!
Installing dlib can take a while, recommending pip’s verbose option might help new users understand what’s going on as the install can appear stalled without it. 🙂
Great site btw!
Ash
Great suggestion, thanks Ash!