Table of Contents
Hessian Matrix, Taylor Series, and the Newton-Raphson Method
In our previous lesson, we delved into the essentials of vector calculus by exploring partial derivatives and the Jacobian matrix, and their pivotal roles in optimization techniques such as Stochastic Gradient Descent (SGD). As we continue our journey through Vector Calculus, we turn our attention to more advanced concepts that further enhance our understanding of optimization algorithms and their applications in machine learning.
In this second lesson, we will dive deep into the Hessian matrix, the Taylor series, and the Newton-Raphson method. These mathematical tools are critical for analyzing and optimizing functions, particularly in multi-dimensional spaces. The Hessian matrix provides us with insights into the curvature of a function, while the Taylor series offers a way to approximate functions with polynomials. Together, these concepts set the stage for the Newton-Raphson method, a powerful iterative technique for optimizing objectives having frequent local optimums.
By understanding and applying these advanced topics, we aim to provide a solid foundation for tackling complex optimization problems. This lesson will equip us with the knowledge needed to fine-tune machine learning models more effectively, ensuring they perform at their best. So, let’s continue our exploration of vector calculus and uncover the mathematical principles that drive successful optimization strategies.
This lesson is the last of a 2-part series on Vector Calculus:
- Partial Derivatives and Jacobian Matrix in Stochastic Gradient Descent
- Hessian Matrix, Taylor Series, and the Newton-Raphson Method (this tutorial)
To learn how to implement the Newton-Raphson Method by using advanced concepts of vector calculus, just keep reading.
Higher-Order Derivatives: The Hessian Matrix
Higher-Order Gradients
Gradients and derivatives are also known as first-order derivatives. Higher-order derivatives or gradients means derivatives of derivatives.
Given a multivariate function : \mathbb{R}^m \rightarrow \mathbb{R}") , higher-order gradients or derivatives are represented as follows:
, higher-order gradients or derivatives are represented as follows:
 : second partial derivative of
: second partial derivative of  with respect to
with respect to  . In other words, the second-order derivative is the derivative of the first-order derivative
. In other words, the second-order derivative is the derivative of the first-order derivative  .
.  is the
is the  order derivative of with respect to .
order derivative of with respect to .  : partial derivative obtained by first partial differentiating with respect to and then with respect to
: partial derivative obtained by first partial differentiating with respect to and then with respect to  .
. - Similarly, is the partial derivative obtained by first partial differentiating with respect to and then with respect to .
 : second partial derivative of
: second partial derivative of  .
.  is the
is the  order derivative of
order derivative of  : partial derivative obtained by first partial differentiating with respect to
: partial derivative obtained by first partial differentiating with respect to  is the partial derivative obtained by first partial differentiating with respect to
is the partial derivative obtained by first partial differentiating with respect to The Hessian Matrix
The Hessian matrix  is a generalization of second-order derivatives for a multivariate function. It is a collection of all the second-order partial derivatives with the
is a generalization of second-order derivatives for a multivariate function. It is a collection of all the second-order partial derivatives with the ^\text{th}") entry given as
entry given as  .
.
In other words,

Note that the partial derivatives  because the variables
because the variables  and
and  are independent of each other. The Hessian is, therefore, a symmetric matrix.
are independent of each other. The Hessian is, therefore, a symmetric matrix.
The following code snippet computes the Hessian matrix of a multivariate function  = x_1^2x_2^3x_3^4") using the concept of second-order partial derivatives:
using the concept of second-order partial derivatives:
If you don’t have SciPy installed in your system, you can do so via pip install scipy.
import numpy as np
from scipy.misc import derivative
warnings.filterwarnings("ignore")
# objective function
def objective(x):
return np.power(x[0], 2)*np.power(x[1], 3)*np.power(x[2], 4)
x0 = [-3, -2, 1] # m-dimensional input vector point to compute the Hessian at
fx0 = objective(x0) # objective evaluation
print("Value of f(x) at x0 = {} is {}".format(x0, fx0))
In this code, we begin by importing necessary libraries and suppressing warnings (Lines 1-3). We define an objective function (Lines 6 and 7) that takes a vector x as input and computes the value of the function  = x_0^2 \cdot x_1^3 \cdot x_2^4") . We initialize
. We initialize x0 as the point at which we want to compute the Hessian matrix (Line 9) and evaluate the objective function at this point (Line 10), printing the result (Line 12).
hessian = [] # m x m matrix
for i in range(len(x0)):
row_i = [] # second-order partial derivatives of the i-th row
for j in range(len(x0)):
# compute the i-j entry of the Hessian using second-order partial derivatives
# first partial differentiating with respect to x_j
pd_j = lambda x: derivative(lambda x_j: objective(x[:j] + [x_j] + x[j+1:]), x[j], dx=1e-6)
# second partial differentiating with respect to x_i
pd_ij = derivative(lambda x_i: pd_j(x0[:i] + [x_i] + x0[i+1:]), x0[i], dx=1e-6)
print("Partial derivative w.r.t to first x_{} and then x_{} is : {}".format(j+1, i+1, np.round_(pd_ij, 2)))
row_i.append(pd_ij)
hessian.append(row_i)
print("Hessian of f(x) at x0 = {} is \n {}".format(x0, np.round_(hessian, 2)))
Next, we initialize an empty list hessian to store the second-order partial derivatives (Line 14). We loop through each element in x0 to compute the entries of the Hessian matrix (Line 15). For each element, we compute the first partial derivative with respect to x_j (Line 20), then compute the second partial derivative with respect to x_i (Line 22). We append these second-order partial derivatives to the corresponding row of the Hessian matrix (Line 25). Finally, we print the computed Hessian matrix, rounded to two decimal places (Line 28).
Output:
Value of f(x) at x0 = [-3, -2, 1] is -72 Partial derivative w.r.t to first x_1 and then x_1 is : -16.0 Partial derivative w.r.t to first x_2 and then x_1 is : -72.0 Partial derivative w.r.t to first x_3 and then x_1 is : 192.0 Partial derivative w.r.t to first x_1 and then x_2 is : -72.0 Partial derivative w.r.t to first x_2 and then x_2 is : -108.01 Partial derivative w.r.t to first x_3 and then x_2 is : 432.0 Partial derivative w.r.t to first x_1 and then x_3 is : 192.0 Partial derivative w.r.t to first x_2 and then x_3 is : 432.0 Partial derivative w.r.t to first x_3 and then x_3 is : -863.99 Hessian of f(x) at x0 = [-3, -2, 1] is [[ -16. -72. 192. ] [ -72. -108.01 432. ] [ 192. 432. -863.99]]
Taylor Series
Linearization
Recall that the derivative  of a function
of a function ") at a point
at a point  is given as follows:
is given as follows:
}{dx} = \lim_{\epsilon \rightarrow 0} \displaystyle\frac{f(x_0+\epsilon) - f(x_0)}{\epsilon}") .
.
In assuming  , the equation above can be rearranged and written as follows:
, the equation above can be rearranged and written as follows:
 = f(x_0) + \displaystyle\frac{df(x_0)}{dx} (x-x_0)")
where  and where
and where  . As can be seen, the derivatives can now be used to approximate any function by a straight line around the point
. As can be seen, the derivatives can now be used to approximate any function by a straight line around the point  .
.
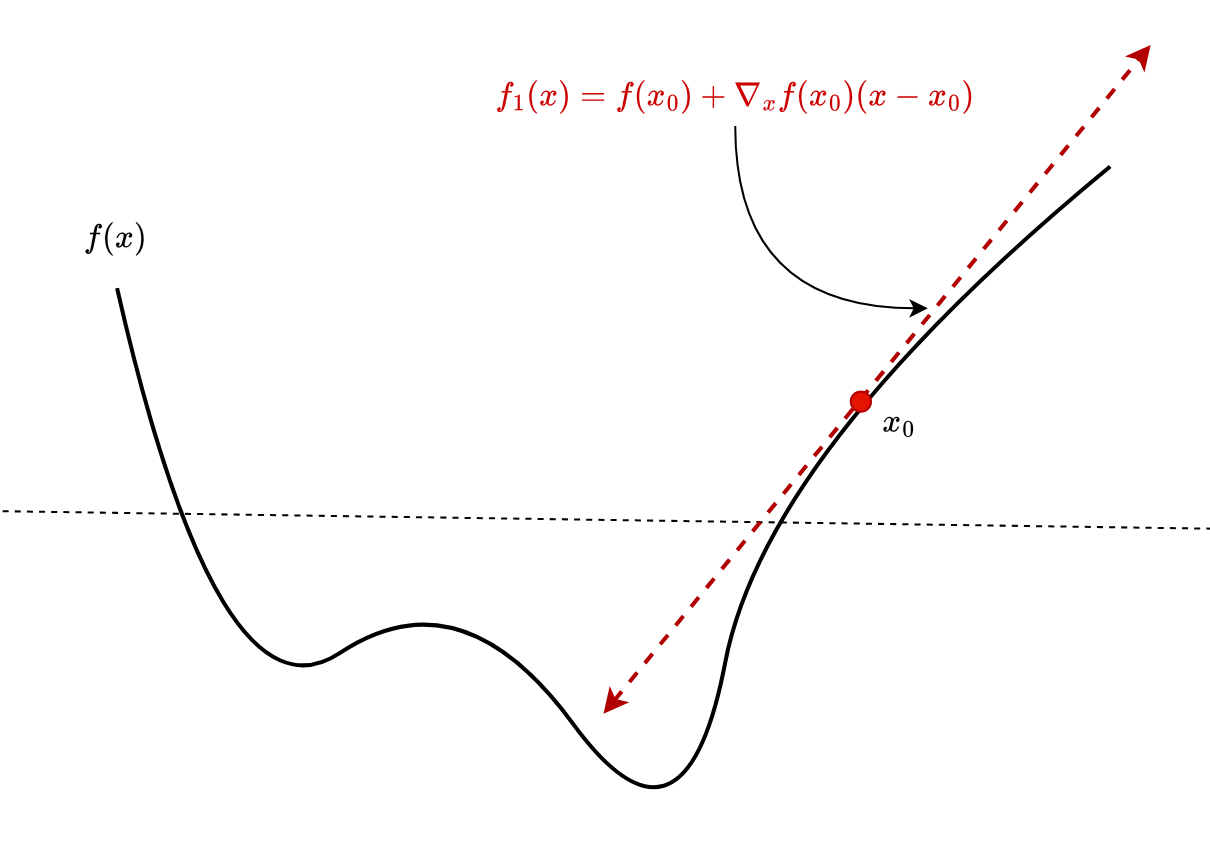
For multivariate, the linearization (Figure 1) above can be generalized as follows:
 = f(x_0) + \nabla_xf(x_0) (x - x_0)")
where ") is the function gradient at the point . This approximation is locally accurate, but as we move farther from the point , it keeps getting worse.
is the function gradient at the point . This approximation is locally accurate, but as we move farther from the point , it keeps getting worse.
Taylor Series Expansion
The linear approximation discussed above is a special case of the Taylor series through which we can approximate any function by an  -degree polynomial (around the point ).
-degree polynomial (around the point ).
For a function,  , its Taylor expansion around the point can be written as follows:
, its Taylor expansion around the point can be written as follows:
 = \displaystyle\sum_{k=0}^{\infty} \displaystyle\frac{D^k_x f(x_0)}{k!} (x-x_0)^k")
where ") is the
is the  order derivative of the function
order derivative of the function  with respect to , evaluated at the point .
with respect to , evaluated at the point .
To approximate the function with an -degree polynomial, we need to take the first  terms of the Taylor series expansion.
terms of the Taylor series expansion.
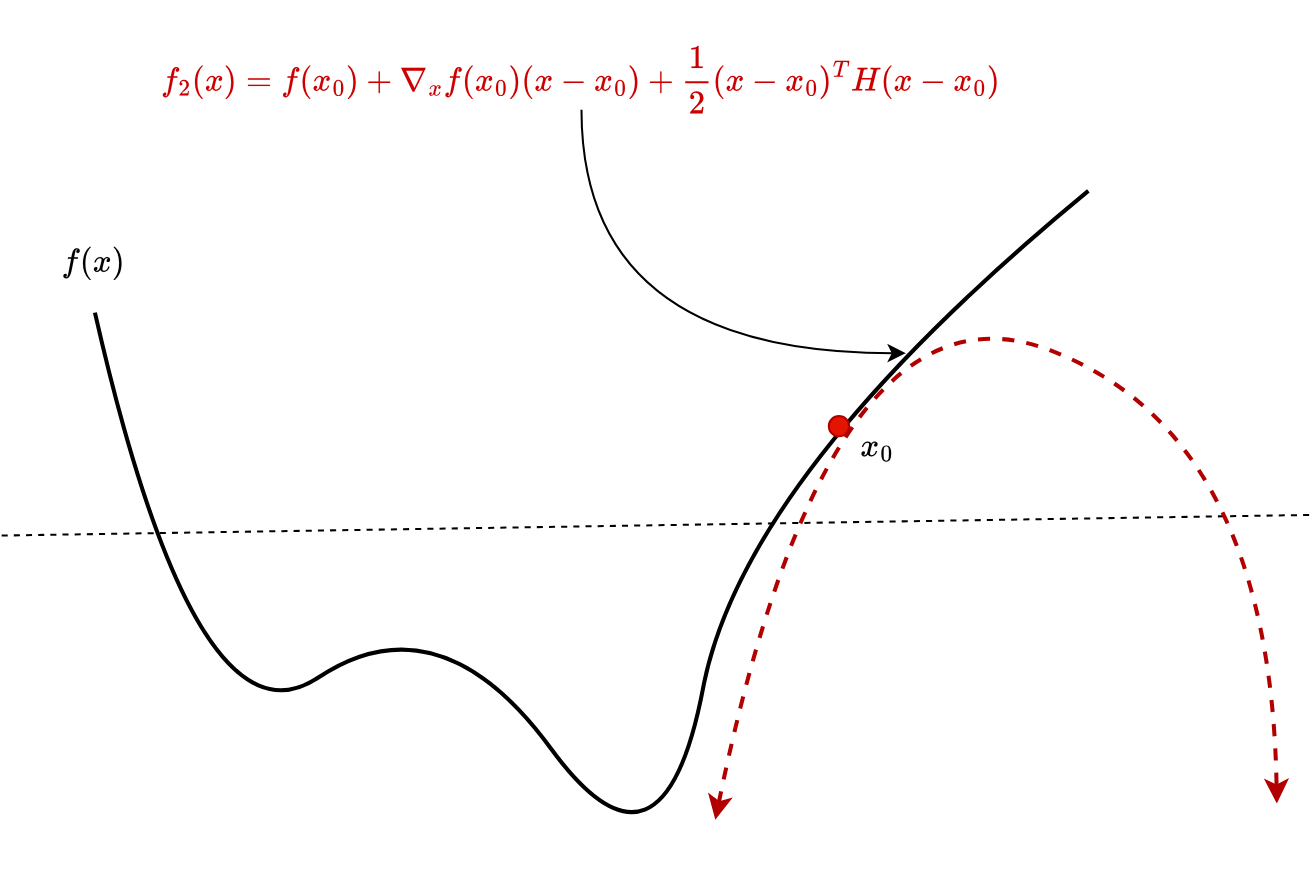
For example, the following polynomial approximates the function using a 2-degree polynomial around the point (Figure 2) :
 = f(x_0) + \nabla_xf(x_0)(x - x_0) + \displaystyle\frac{1}{2}(x - x_0)^T H(x_0) (x - x_0)")
where ") is the Hessian of the function at the point , and
is the Hessian of the function at the point , and ^T") is the matrix or vector transpose function.
is the matrix or vector transpose function.
Let’s consider the function  = f(x_1, x_2) = e^{x_1} + \sin(x_2)") , which we seek to approximate by 1- and 2-degree polynomials around the point
, which we seek to approximate by 1- and 2-degree polynomials around the point ") . The gradient and Hessian of the function are given as follows:
. The gradient and Hessian of the function are given as follows:
![\nabla_x f(x) = [ e^{x_1}, \cos(x_2) ]](https://b2633864.smushcdn.com/2633864/wp-content/latex/1d0/1d03484e281889b94cb73b5b12824df6-ffffff-000000-0.png?size=160x19&lossy=2&strip=1&webp=1 "\nabla_x f(x) = [ e^{x_1}, \cos(x_2) ]")
 = \begin{bmatrix} e^{x_1} & 0 \\ 0 & -\sin(x_2) \end{bmatrix}")
Using the Taylor series expansion, the 1-degree polynomial (or linear) approximation ") can be written as follows:
can be written as follows:
 = f(x_0) + \nabla_xf(x)(x - x_0) = e + \sin(1) + e(x_1-1) + \cos(1)(x_2 -1)")
Similarly, the 2-degree polynomial approximation ") can be written as follows:
can be written as follows:
 = e + \sin(1) + e(x_1-1) + \cos(1)(x_2 -1) + \displaystyle\frac{1}{2}e(x_1-1)^2 -\frac{1}{2}\sin(1)(x_2 -1)^2")
The code snippet below implements and validates the approximations above:
import numpy as np
from scipy.misc import derivative
import matplotlib.pyplot as plt
warnings.filterwarnings("ignore")
# objective function
def objective(x):
return np.round(np.exp(x[0]) + np.sin(x[1]), 2)
# one-degree polynomial approximation or linearization
def linear_approximation(x, x0):
return np.round(objective(x0) + \
np.exp(x0[0])*(x[0] - x0[0]) + np.cos(x0[1])*(x[1] - x0[1]), 2)
# two-degree polynomial approximation
def quadratic_approximation(x, x0):
return np.round(objective(x0) \
+ np.exp(x0[0])*(x[0] - x0[0]) + np.cos(x0[1])*(x[1] - x0[1]) \
+ 0.5*np.exp(x0[0])*(x[0] - x0[0])*(x[0] - x0[0]) \
- 0.5*np.sin(x0[1])*(x[1] - x0[1])*(x[1] - x0[1]), 2)
In this code, we start by importing necessary libraries (Lines 29-31) and define an objective function (Lines 35 and 36) that takes a vector x and returns the rounded value of ![e^{x[0]} + \sin(x[1])](https://b2633864.smushcdn.com/2633864/wp-content/latex/df5/df5758f5b1141f65fb98f0e3886954e2-ffffff-000000-0.png?size=105x20&lossy=2&strip=1&webp=1 "e^{x[0]} + \sin(x[1])") . We then define two functions for polynomial approximations:
. We then define two functions for polynomial approximations: linear_approximation (Lines 39-41) and quadratic_approximation (Lines 44-48). These functions create linear and quadratic approximations of the objective function around a point x0 by using first and second derivatives, respectively.
x0 = [1, 1] # m-dimensional input vector point to compute the Hessian at
fx0 = objective(x0) # objective evaluation
xs = [[1.1, 0.9], [0.9, 1.1], [1.5, 0.5], [0.5, 1.5]] # points to evaluate
# print actual function value, its linear and quadratic approximation
for x in xs:
print("Evaluating at x = {}".format(x))
print("Actual f(x) : {} ".format(objective(x)))
print("Linear approximation of f(x) : {}".format(linear_approximation(x, x0)))
print("Quadratic approximation of f(x) : {}".format(quadratic_approximation(x, x0)))
print("-----")
# plot all the curves for graphic visualization
plt.figure(figsize=(30,10))
plt.rcParams.update({'font.size': 30})
x1s, x2s = np.arange(x0[0] - 0.75, x0[0] + 0.75, 0.05), np.arange(x0[1] - 0.75, x0[1] + 0.75, 0.05)
fs = {
0: ["Actual f(x)", objective],
1: ["Linear approx. of f(x)", lambda x: linear_approximation(x, x0)],
2: ["Quadratic approx. of f(x)", lambda x: quadratic_approximation(x, x0)]
}
for i in range(3):
plt.subplot(1, 3, i+1)
zs = [[fs[i][1]([x1,x2]) for x2 in x2s] for x1 in x1s]
plt.contourf(x1s, x2s, zs)
plt.title(fs[i][0])
plt.xlabel('x1')
plt.ylabel('x2')
plt.scatter(x0[0], x0[1], color='yellow', linewidths=6, label='(x1, x2)')
plt.legend()
plt.show()
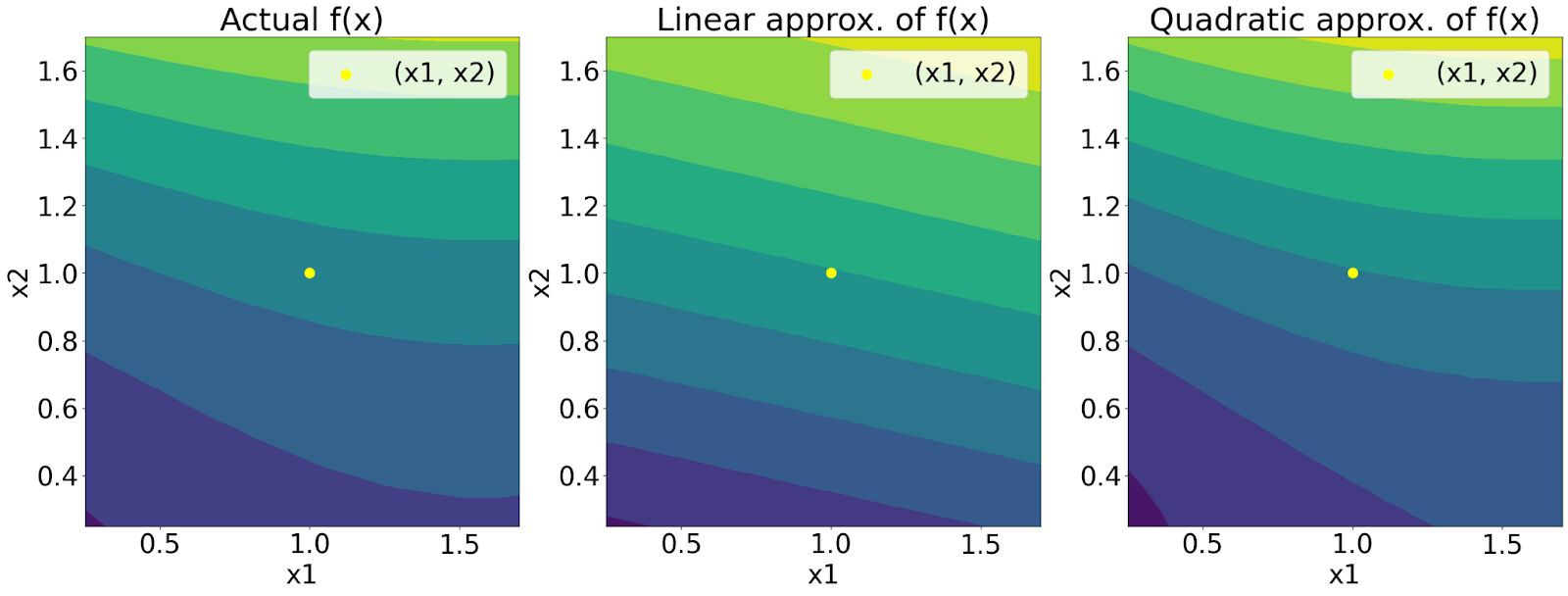
Next, we initialize x0 as the point of interest (Line 50) and evaluate the objective function at this point (Line 51). We define a list of points xs to evaluate the function and its approximations (Line 53). For each point in xs, we print the actual function value, its linear, and quadratic approximations (Lines 56-61). Finally, we plot these values for visualization (Lines 64-85). The plots show the actual function, linear approximation, and quadratic approximation, with x0 highlighted on each plot (Figure 3). This helps us visually compare the approximations to the actual function.
Output:
Evaluating at x = [1.1, 0.9] Actual f(x) : 3.79 Linear approximation of f(x) : 3.78 Quadratic approximation of f(x) : 3.79 ----- Evaluating at x = [0.9, 1.1] Actual f(x) : 3.35 Linear approximation of f(x) : 3.34 Quadratic approximation of f(x) : 3.35 ----- Evaluating at x = [1.5, 0.5] Actual f(x) : 4.96 Linear approximation of f(x) : 4.65 Quadratic approximation of f(x) : 4.88 ----- Evaluating at x = [0.5, 1.5] Actual f(x) : 2.65 Linear approximation of f(x) : 2.47 Quadratic approximation of f(x) : 2.71 -----
Newton-Raphson Method
Newton’s methods are a class of optimization algorithms that leverage second-order information (e.g., Hessians) to achieve faster and more efficient convergence. In contrast, the gradient descent algorithms, like the Stochastic Gradient Descent (as discussed in the previous lesson), depend solely on first-order gradient information.
The idea of Newton’s method is to utilize the curvature information present in Hessians to obtain a more accurate approximation of the function near the optimum.
Recall the 2-degree Taylor series expansion of our objective around a point  (at the time
(at the time  ) as follows:
) as follows:
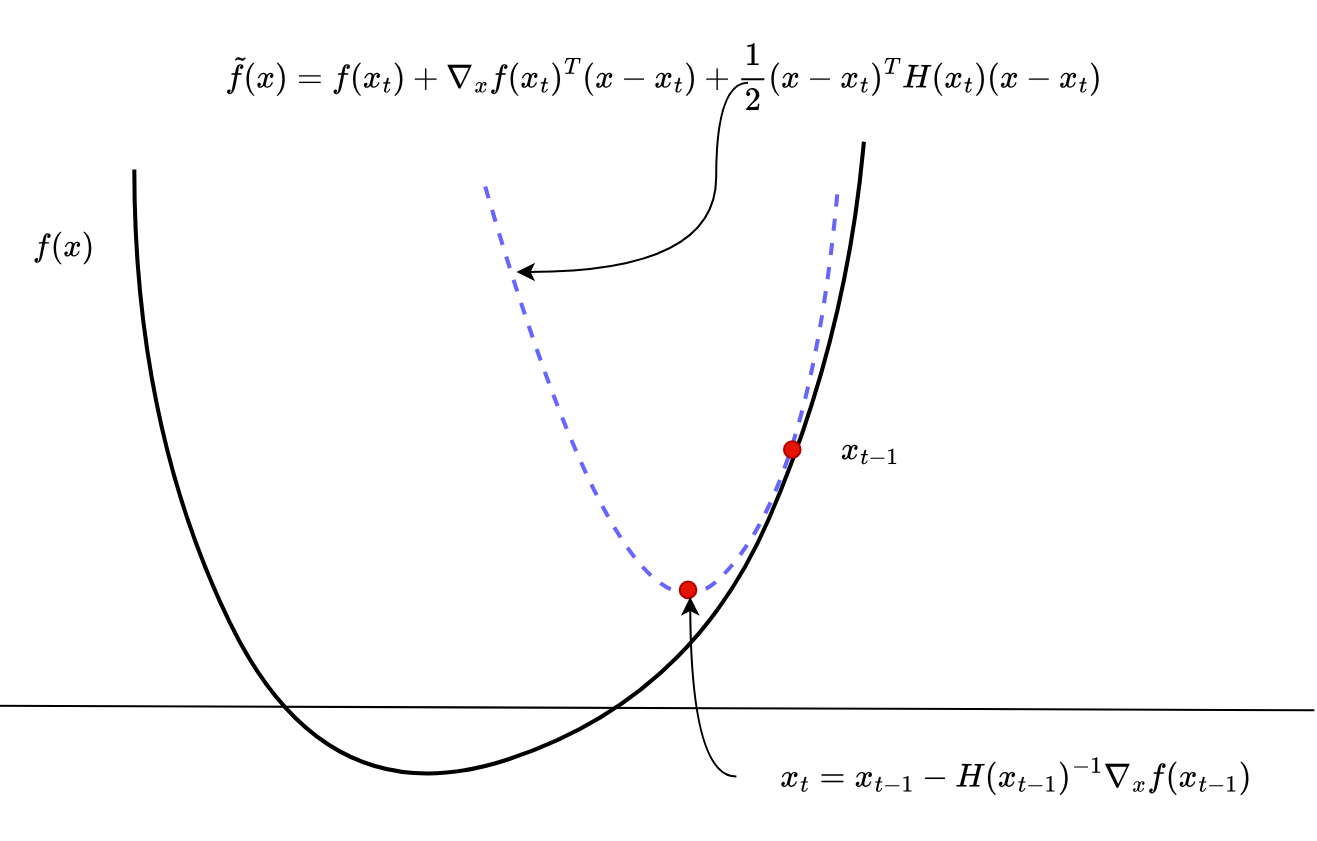
 = f(x_t) + \nabla_x f(x_t)^T(x-x_t) + \displaystyle\frac{1}{2}(x-x_t) ^T H(x_t) (x-x_t)")
where ") and
and ") represents the gradient and the Hessian of the function at
represents the gradient and the Hessian of the function at  , respectively.
, respectively.
Because the function ") locally approximates around , the minimum value of will provide us the minimum value of the original function around .
locally approximates around , the minimum value of will provide us the minimum value of the original function around .
Because is a quadratic (convex) function, we can find its minimum by setting its gradient with respect to as 0, as given below:
 = \nabla_x f(x_t) + H(x_t)(x-x_t) = 0")
Solving the equation above gives us the updated rule of the Newton algorithm at time  as follows:
as follows:
^{-1} \nabla_x f(x_t)")
The method uses this equation to iteratively update the guess until it converges to the optimal solution of the function. The algorithm is said to converge once the guess stops changing.

Figure 4 illustrates how Newton’s method works:
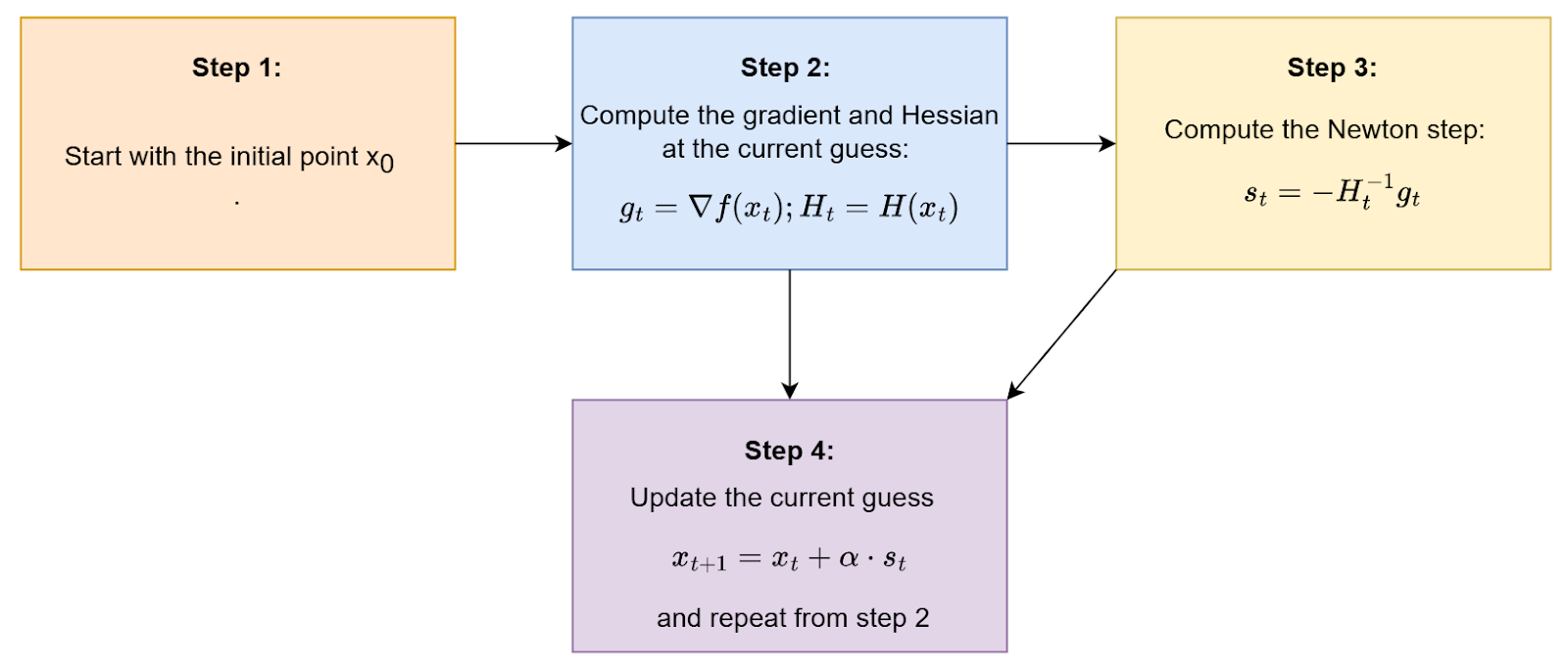
Here’s a step-by-step explanation of how it works (Figure 5):
- Initial guess: Start with an initial guess
 .
. - Gradient and Hessian: Calculate the gradient (first derivative) and the Hessian (second derivative) of the function at the current guess .
- Newton step: Compute the Newton step, which is the direction in which the function decreases the fastest. This is given by the negative inverse of the Hessian times the gradient (i.e.,
^{-1} \nabla_x f(x_t)") ).
). - Update: Update the current guess by taking a step in the direction of the Newton step with the step size
 (i.e.,
(i.e., ^{-1} \nabla_x f(x_t)") ).
). - Iteration: Repeat Steps 2-4 until the change in function value or change in
 is below a certain threshold.
is below a certain threshold.
^{-1} \nabla_x f(x_t)") ).
). (i.e.,
(i.e., ^{-1} \nabla_x f(x_t)") ).
).
In Figure 4, the black line represents the objective function, and the dotted blue line represents the 2-degree polynomial approximation of the objective function at the current point,  .
.
Newton’s method utilizes the curvature information present in Hessians to approximate the function by a quadratic polynomial at the current point . It then updates the current point with the optimum of that approximated function .
The code below implements the Newton-Raphson method algorithm on the Rosenbrock function  = (1-x)^2 + 100(y-x^2)^2") , which is a non-convex function with a global optimum at
, which is a non-convex function with a global optimum at  = 0") and several local optimums around it. These local optimums prevent the standard gradient descent algorithms (e.g., stochastic gradient descent) from converging to the global optimal solution.
and several local optimums around it. These local optimums prevent the standard gradient descent algorithms (e.g., stochastic gradient descent) from converging to the global optimal solution.
import numpy as np
import matplotlib.pyplot as plt
# define the Rosenbrock function
def objective(x,y):
return (1 - x)**2 + 100 * (y - x**2)**2
# gradient of objective
def gradient(x, y):
dx = -2 * (1 - x) - 400 * x * (y - x**2)
dy = 200 * (y - x**2)
return np.array([dx, dy])
def hessian(x, y):
dxx = 2 -400*y + 1200*(x**2)
dyy = 200
dxy = -400*x
return np.array([[dxx, dxy], [dxy, dyy]])
In this code, we start by defining the Rosenbrock function as our objective function (Lines 90 and 91). This is a common test problem for optimization algorithms, known for its banana-shaped valley. We also define functions to compute the gradient (Lines 94-97) and Hessian matrix (Lines 99-104) of the objective function.
T = 5 # total iterations
x_t, y_t = 3, -2 # initial point
path = [[x_t, y_t]]
alpha = 1
for t in range(T):
grad = gradient(x_t, y_t) # compute gradient
H = hessian(x_t, y_t) # compute gradient
Hinv = np.linalg.inv(H)
newton_step = -np.dot(Hinv, grad)
x_t = x_t + alpha*newton_step[0]
y_t = y_t + alpha*newton_step[1]
if t%1 == 0 or t == T-1:
path.append([x_t, y_t])
print("(x,y) at step {} = ({:.3f}, {:.3f})".format(t, x_t, y_t))
We initialize the total number of iterations T, the starting point (x_t, y_t), and set the learning rate alpha (Lines 106-109). We then enter a loop to perform the Newton-Raphson method for optimization. Within each iteration, we compute the gradient and Hessian matrix, calculate the Newton step, update the variables, and store the path for visualization (Lines 111-123).
print("Optimal solution (x,y) = ({:.3f}, {:.3f})".format(x_t, y_t))
print("Optimal objective f(x,y) = {:.3f}".format(objective(x_t, y_t)))
# plot the curve for graphic visualization
plt.figure(figsize=(5,5))
plt.rcParams.update({'font.size': 11})
xs, ys = np.arange(-10.0, 10.0, 0.05), np.arange(-10.0, 10.0, 0.05)
zs = [[objective(x, y) for x in xs] for y in ys]
plt.contourf(xs, ys, zs) # Visualize the contour plot
plt.title('Filled Contour Plot')
plt.xlabel('y')
plt.ylabel('x')
# visualize the optimal point
plt.scatter(y_t, x_t, linewidth=6, color='orange', label='optimum, Loss = {:.2f}'.format(objective(x_t, y_t)))
for i in range(len(path) -1):
plt.arrow(path[i][1], path[i][0], (path[i+1][1] -path[i][1]), (path[i+1][0] - path[i][0]), color='yellow', width=0.02)
plt.show()
After completing the optimization, we print the optimal solution and its objective function value (Lines 125 and 126). For visualization, we create a contour plot of the objective function using plt.contourf, highlight the optimal point, and display the path of iterations with arrows (Lines 129-144). Finally, we display the plot with plt.show (Line 146), which visually illustrates the optimization process and the path taken to reach the optimal solution (Figure 6).
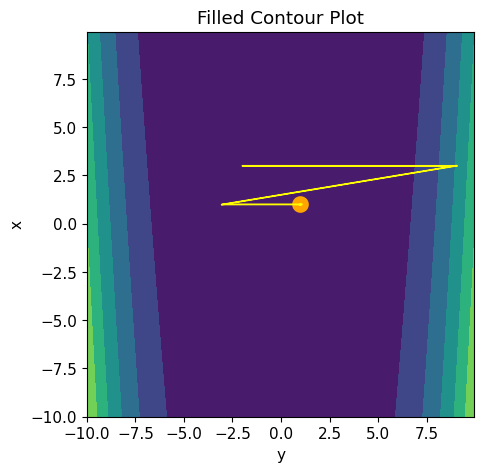
Output:
(x,y) at step 0 = (2.999, 8.995) (x,y) at step 1 = (1.000, -2.994) (x,y) at step 2 = (1.000, 1.001) (x,y) at step 3 = (1.000, 1.000) (x,y) at step 4 = (1.000, 1.000) Optimal solution (x,y) = (1.000, 1.000) Optimal objective f(x,y) = 0.000
Summary
In this blog post, we delve into the fascinating interplay between the Hessian matrix, the Taylor series, and the Newton-Raphson method. We begin by exploring higher-order derivatives, focusing on the Hessian Matrix and its significance in optimization. Next, we discuss higher-order gradients and their applications.
We then introduce the Taylor series, starting with linearization and progressing to the Taylor series expansion, demonstrating how these mathematical tools provide approximations of functions. Finally, we examine the Newton-Raphson method, a powerful technique for finding roots of functions.
Throughout the post, we connect these concepts, highlighting their roles in optimization and computational mathematics. By the end, we offer a comprehensive understanding of these fundamental tools and their applications.
Citation Information
Mangla, P. “Hessian Matrix, Taylor Series, and the Newton-Raphson Method,” PyImageSearch, P. Chugh, S. Huot, and P. Thakur, eds., 2025, https://pyimg.co/1pqgw
@incollection{Mangla_2025_partial-derivatives--jacobian-matrix-sgd,
author = {Puneet Mangla},
title = {{Hessian Matrix, Taylor Series, and the Newton-Raphson Method}},
booktitle = {PyImageSearch},
editor = {Puneet Chugh and Susan Huot and Piyush Thakur},
year = {2025},
url = {https://pyimg.co/1pqgw},
}
To download the source code to this post (and be notified when future tutorials are published here on PyImageSearch), simply enter your email address in the form below!

Download the Source Code and FREE 17-page Resource Guide
Enter your email address below to get a .zip of the code and a FREE 17-page Resource Guide on Computer Vision, OpenCV, and Deep Learning. Inside you'll find my hand-picked tutorials, books, courses, and libraries to help you master CV and DL!


Comment section
Hey, Adrian Rosebrock here, author and creator of PyImageSearch. While I love hearing from readers, a couple years ago I made the tough decision to no longer offer 1:1 help over blog post comments.
At the time I was receiving 200+ emails per day and another 100+ blog post comments. I simply did not have the time to moderate and respond to them all, and the sheer volume of requests was taking a toll on me.
Instead, my goal is to do the most good for the computer vision, deep learning, and OpenCV community at large by focusing my time on authoring high-quality blog posts, tutorials, and books/courses.
If you need help learning computer vision and deep learning, I suggest you refer to my full catalog of books and courses — they have helped tens of thousands of developers, students, and researchers just like yourself learn Computer Vision, Deep Learning, and OpenCV.
Click here to browse my full catalog.